 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEgoSpeed-Net: Forecasting Speed-Control in Driver Behavior from Egocentric Video Data
Sep 27, 2022
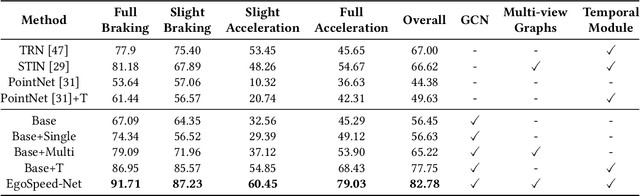


Speed-control forecasting, a challenging problem in driver behavior analysis, aims to predict the future actions of a driver in controlling vehicle speed such as braking or acceleration. In this paper, we try to address this challenge solely using egocentric video data, in contrast to the majority of works in the literature using either third-person view data or extra vehicle sensor data such as GPS, or both. To this end, we propose a novel graph convolutional network (GCN) based network, namely, EgoSpeed-Net. We are motivated by the fact that the position changes of objects over time can provide us very useful clues for forecasting the speed change in future. We first model the spatial relations among the objects from each class, frame by frame, using fully-connected graphs, on top of which GCNs are applied for feature extraction. Then we utilize a long short-term memory network to fuse such features per class over time into a vector, concatenate such vectors and forecast a speed-control action using a multilayer perceptron classifier. We conduct extensive experiments on the Honda Research Institute Driving Dataset and demonstrate the superior performance of EgoSpeed-Net.