 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTracking and fast imaging of a translational object via Fourier modulation
Oct 28, 2023



The tracking and imaging of high-speed moving objects hold significant promise for application in various fields. Single-pixel imaging enables the progressive capture of a fast-moving translational object through motion compensation. However, achieving a balance between a short reconstruction time and a good image quality is challenging. In this study, we present a approach that simultaneously incorporates position encoding and spatial information encoding through the Fourier patterns. The utilization of Fourier patterns with specific spatial frequencies ensures robust and accurate object localization. By exploiting the properties of the Fourier transform, our method achieves a remarkable reduction in time complexity and memory consumption while significantly enhancing image quality. Furthermore, we introduce an optimized sampling strategy specifically tailored for small moving objects, significantly reducing the required dwell time for imaging. The proposed method provides a practical solution for the real-time tracking, imaging and edge detection of translational objects, underscoring its considerable potential for diverse applications.
Single-pixel tracking and imaging of a high-speed moving object
Sep 04, 2022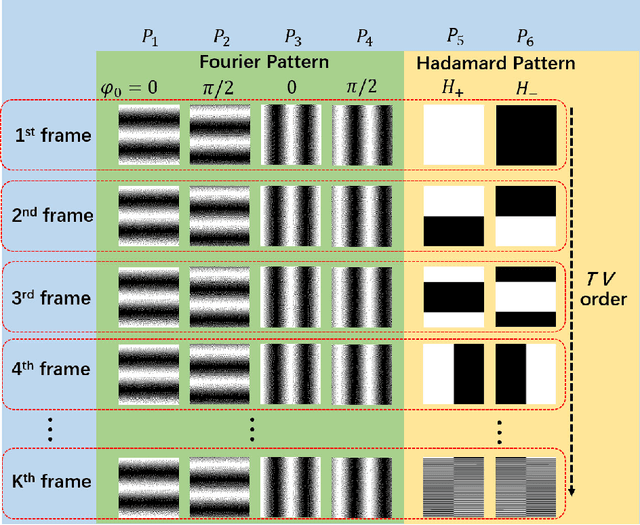
Image-free tracking methods based on single-pixel detection have been able to track a moving object at a very high frame rate, but these tracking methods can not achieve simultaneous imaging of the object. Here we report a method for simultaneously tracking and imaging a high-speed moving object. Four binary Fourier patterns and two differential Hadamard patterns are used to modulate one frame of the object, then the modulated light signals are obtained by single-pixel detection. The trajectory and the image of the moving object can be gradually obtained along with the detection. The proposed method does not need any prior knowledge of the object and its motion. It has been verified by simulations and experiments which achieves a frame rate of 3332$~\mathrm{Hz}$ at a spatial resolution of $128 \times 128$ pixels by using a 20000$~\mathrm{Hz}$ digital micromirror device. This proposed method can broaden the application of image-free tracking methods and realize the detection of spatial information of the moving object.