 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRoPGen: Towards Robust Code Authorship Attribution via Automatic Coding Style Transformation
Feb 12, 2022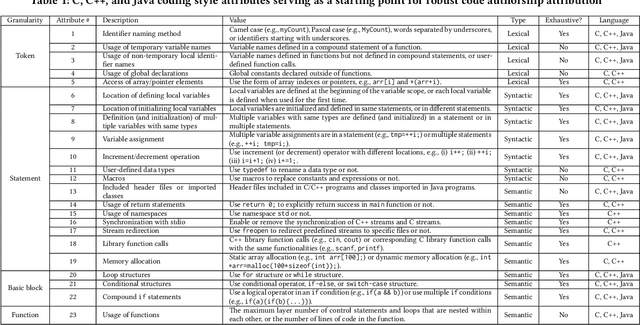
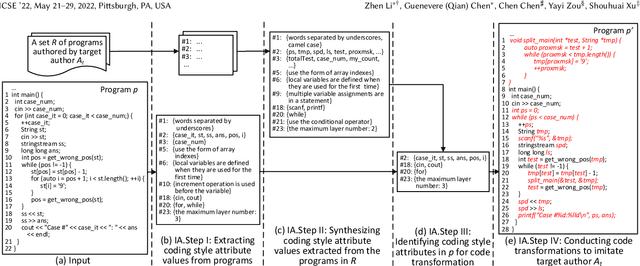
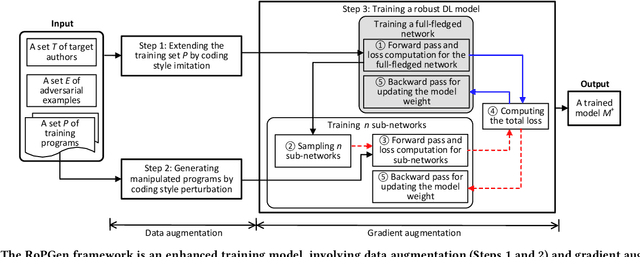

Source code authorship attribution is an important problem often encountered in applications such as software forensics, bug fixing, and software quality analysis. Recent studies show that current source code authorship attribution methods can be compromised by attackers exploiting adversarial examples and coding style manipulation. This calls for robust solutions to the problem of code authorship attribution. In this paper, we initiate the study on making Deep Learning (DL)-based code authorship attribution robust. We propose an innovative framework called Robust coding style Patterns Generation (RoPGen), which essentially learns authors' unique coding style patterns that are hard for attackers to manipulate or imitate. The key idea is to combine data augmentation and gradient augmentation at the adversarial training phase. This effectively increases the diversity of training examples, generates meaningful perturbations to gradients of deep neural networks, and learns diversified representations of coding styles. We evaluate the effectiveness of RoPGen using four datasets of programs written in C, C++, and Java. Experimental results show that RoPGen can significantly improve the robustness of DL-based code authorship attribution, by respectively reducing 22.8% and 41.0% of the success rate of targeted and untargeted attacks on average.
Value-based Bayesian Meta-reinforcement Learning and Traffic Signal Control
Oct 01, 2020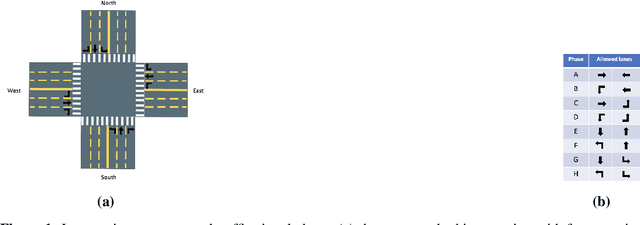
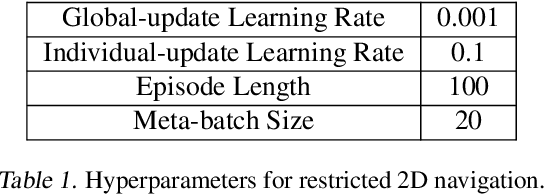
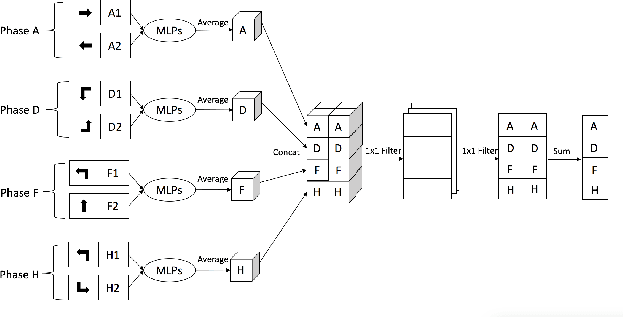
Reinforcement learning methods for traffic signal control has gained increasing interests recently and achieved better performances compared with traditional transportation methods. However, reinforcement learning based methods usually requires heavy training data and computational resources which largely limit its application in real-world traffic signal control. This makes meta-learning, which enables data-efficient and fast-adaptation training by leveraging the knowledge of previous learning experiences, catches attentions in traffic signal control. In this paper, we propose a novel value-based Bayesian meta-reinforcement learning framework BM-DQN to robustly speed up the learning process in new scenarios by utilizing well-trained prior knowledge learned from existing scenarios. This framework based on our proposed fast-adaptation variation to Gradient-EM Bayesian Meta-learning and the fast update advantage of DQN, which allows fast adaptation to new scenarios with continual learning ability and robustness to uncertainty. The experiments on 2D navigation and traffic signal control show that our proposed framework adapts more quickly and robustly in new scenarios than previous methods, and specifically, much better continual learning ability in heterogeneous scenarios.
Gradient-EM Bayesian Meta-learning
Jun 21, 2020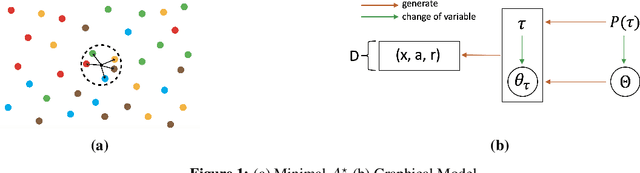
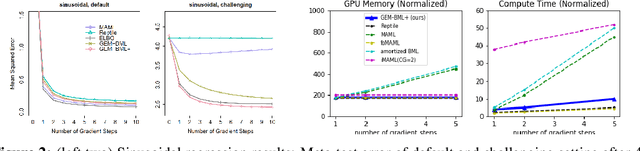

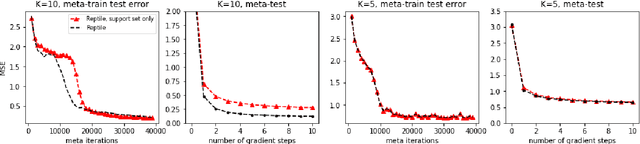
Bayesian meta-learning enables robust and fast adaptation to new tasks with uncertainty assessment. The key idea behind Bayesian meta-learning is empirical Bayes inference of hierarchical model. In this work, we extend this framework to include a variety of existing methods, before proposing our variant based on gradient-EM algorithm. Our method improves computational efficiency by avoiding back-propagation computation in the meta-update step, which is exhausting for deep neural networks. Furthermore, it provides flexibility to the inner-update optimization procedure by decoupling it from meta-update. Experiments on sinusoidal regression, few-shot image classification, and policy-based reinforcement learning show that our method not only achieves better accuracy with less computation cost, but is also more robust to uncertainty.