 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLinkD: AutoRegressive Diffusion Model for Mechanical Linkage Synthesis
Jan 07, 2026Designing mechanical linkages to achieve target end-effector trajectories presents a fundamental challenge due to the intricate coupling between continuous node placements, discrete topological configurations, and nonlinear kinematic constraints. The highly nonlinear motion-to-configuration relationship means small perturbations in joint positions drastically alter trajectories, while the combinatorially expanding design space renders conventional optimization and heuristic methods computationally intractable. We introduce an autoregressive diffusion framework that exploits the dyadic nature of linkage assembly by representing mechanisms as sequentially constructed graphs, where nodes correspond to joints and edges to rigid links. Our approach combines a causal transformer with a Denoising Diffusion Probabilistic Model (DDPM), both conditioned on target trajectories encoded via a transformer encoder. The causal transformer autoregressively predicts discrete topology node-by-node, while the DDPM refines each node's spatial coordinates and edge connectivity to previously generated nodes. This sequential generation enables adaptive trial-and-error synthesis where problematic nodes exhibiting kinematic locking or collisions can be selectively regenerated, allowing autonomous correction of degenerate configurations during design. Our graph-based, data-driven methodology surpasses traditional optimization approaches, enabling scalable inverse design that generalizes to mechanisms with arbitrary node counts. We demonstrate successful synthesis of linkage systems containing up to 20 nodes with extensibility to N-node architectures. This work advances autoregressive graph generation methodologies and computational kinematic synthesis, establishing new paradigms for scalable inverse design of complex mechanical systems.
Adsorb-Agent: Autonomous Identification of Stable Adsorption Configurations via Large Language Model Agent
Oct 22, 2024Adsorption energy is a key reactivity descriptor in catalysis, enabling the efficient screening of potential catalysts. However, determining adsorption energy involves comparing the energies of multiple adsorbate-catalyst configurations, which is computationally demanding due to a large number of possible configurations. Current algorithmic approaches typically enumerate adsorption sites and configurations without leveraging theoretical insights to guide the initial setup. In this work, we present Adsorb-Agent, a Large Language Model (LLM) agent designed to efficiently derive system-specific stable adsorption configurations with minimal human intervention. Adsorb-Agent leverages built-in knowledge and emergent reasoning capabilities, significantly reducing the number of initial configurations required while improving accuracy in predicting the minimum adsorption energy. We demonstrate its performance using two example systems, NNH-CuPd3 (111) and NNH-Mo3Pd (111), for the Nitrogen Reduction Reaction (NRR), a sustainable alternative to the Haber-Bosch process. Adsorb-Agent outperforms conventional "heuristic" and "random" algorithms by identifying lower-energy configurations with fewer initial setups, reducing computational costs while enhancing accuracy. This highlights its potential to accelerate catalyst discovery.
LLM-3D Print: Large Language Models To Monitor and Control 3D Printing
Aug 26, 2024Industry 4.0 has revolutionized manufacturing by driving digitalization and shifting the paradigm toward additive manufacturing (AM). Fused Deposition Modeling (FDM), a key AM technology, enables the creation of highly customized, cost-effective products with minimal material waste through layer-by-layer extrusion, posing a significant challenge to traditional subtractive methods. However, the susceptibility of material extrusion techniques to errors often requires expert intervention to detect and mitigate defects that can severely compromise product quality. While automated error detection and machine learning models exist, their generalizability across diverse 3D printer setups, firmware, and sensors is limited, and deep learning methods require extensive labeled datasets, hindering scalability and adaptability. To address these challenges, we present a process monitoring and control framework that leverages pre-trained Large Language Models (LLMs) alongside 3D printers to detect and address printing defects. The LLM evaluates print quality by analyzing images captured after each layer or print segment, identifying failure modes and querying the printer for relevant parameters. It then generates and executes a corrective action plan. We validated the effectiveness of the proposed framework in identifying defects by comparing it against a control group of engineers with diverse AM expertise. Our evaluation demonstrated that LLM-based agents not only accurately identify common 3D printing errors, such as inconsistent extrusion, stringing, warping, and layer adhesion, but also effectively determine the parameters causing these failures and autonomously correct them without any need for human intervention.
Large Language Model Agent as a Mechanical Designer
Apr 26, 2024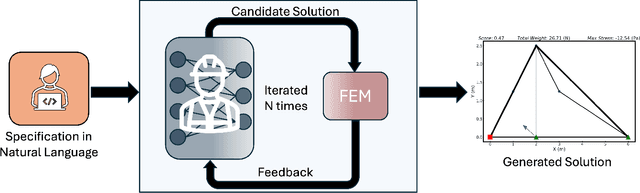
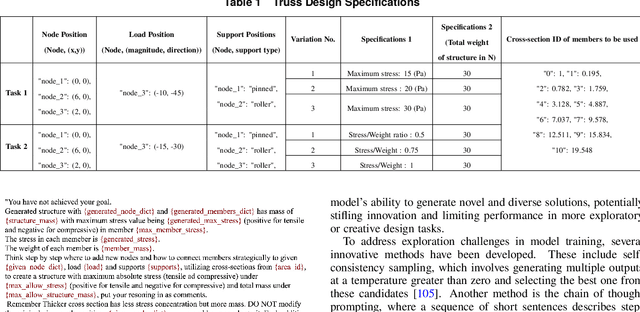
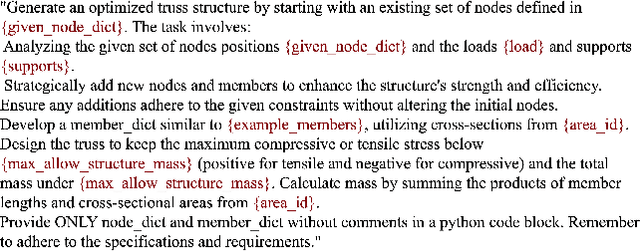
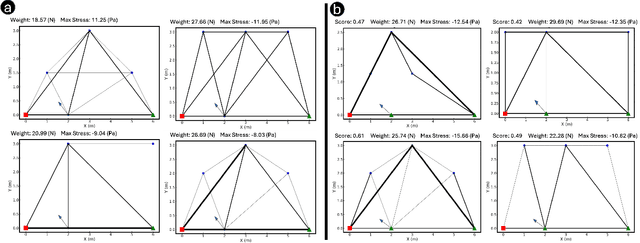
Conventional mechanical design paradigms rely on experts systematically refining concepts through experience-guided modification and FEA to meet specific requirements. However, this approach can be time-consuming and heavily dependent on prior knowledge and experience. While numerous machine learning models have been developed to streamline this intensive and expert-driven iterative process, these methods typically demand extensive training data and considerable computational resources. Furthermore, methods based on deep learning are usually restricted to the specific domains and tasks for which they were trained, limiting their applicability across different tasks. This creates a trade-off between the efficiency of automation and the demand for resources. In this study, we present a novel approach that integrates pre-trained LLMs with a FEM module. The FEM module evaluates each design and provides essential feedback, guiding the LLMs to continuously learn, plan, generate, and optimize designs without the need for domain-specific training. We demonstrate the effectiveness of our proposed framework in managing the iterative optimization of truss structures, showcasing its capability to reason about and refine designs according to structured feedback and criteria. Our results reveal that these LLM-based agents can successfully generate truss designs that comply with natural language specifications with a success rate of up to 90%, which varies according to the applied constraints. By employing prompt-based optimization techniques we show that LLM based agents exhibit optimization behavior when provided with solution-score pairs to iteratively refine designs to meet specifications. This ability of LLM agents to produce viable designs and optimize them based on their inherent reasoning capabilities highlights their potential to develop and implement effective design strategies autonomously.
Dominant motion identification of multi-particle system using deep learning from video
Apr 26, 2021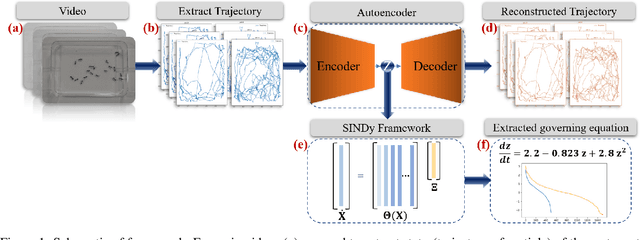
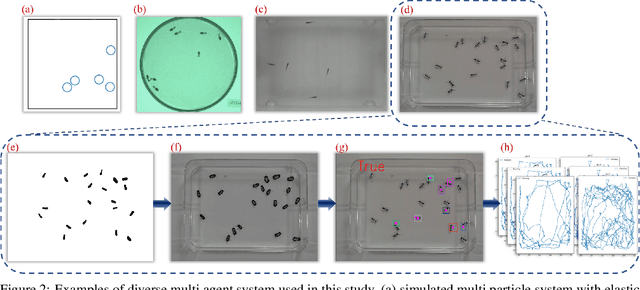
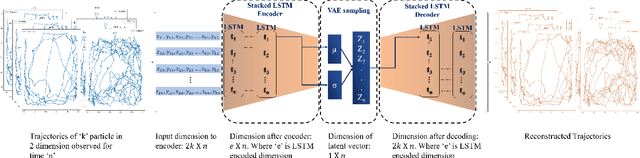
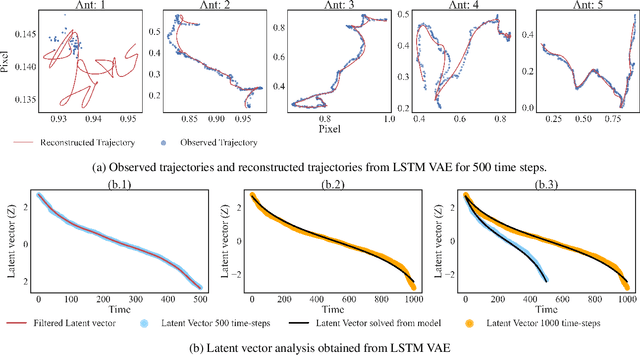
Identifying underlying governing equations and physical relevant information from high-dimensional observable data has always been a challenge in physical sciences. With the recent advances in sensing technology and available datasets, various machine learning techniques have made it possible to distill underlying mathematical models from sufficiently clean and usable datasets. However, most of these techniques rely on prior knowledge of the system and noise-free data obtained by simulation of physical system or by direct measurements of the signals. Hence, the inference obtained by using these techniques is often unreliable to be used in the real world where observed data is noisy and requires feature engineering to extract relevant features. In this work, we provide a deep-learning framework that extracts relevant information from real-world videos of highly stochastic systems, with no prior knowledge and distills the underlying governing equation representing the system. We demonstrate this approach on videos of confined multi-agent/particle systems of ants, termites, fishes as well as a simulated confined multi-particle system with elastic collision interactions. Furthermore, we explore how these seemingly diverse systems have predictable underlying behavior. In this study, we have used computer vision and motion tracking to extract spatial trajectories of individual agents/particles in a system, and by using LSTM VAE we projected these features on a low-dimensional latent space from which the underlying differential equation representing the data was extracted using SINDy framework.