 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEntity Augmentation for Efficient Classification of Vertically Partitioned Data with Limited Overlap
Jun 25, 2024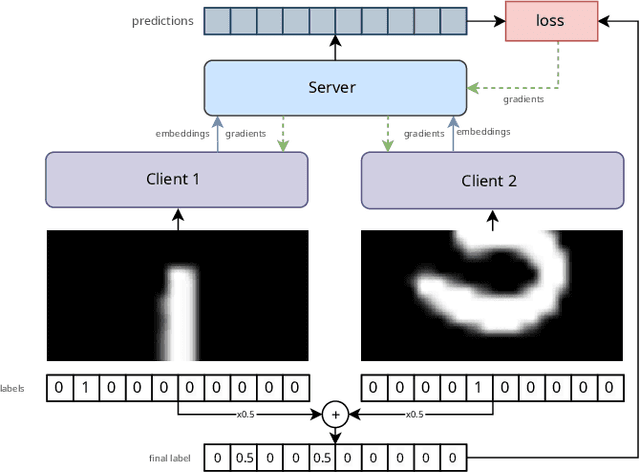
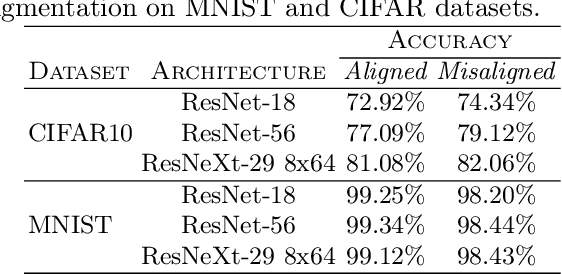
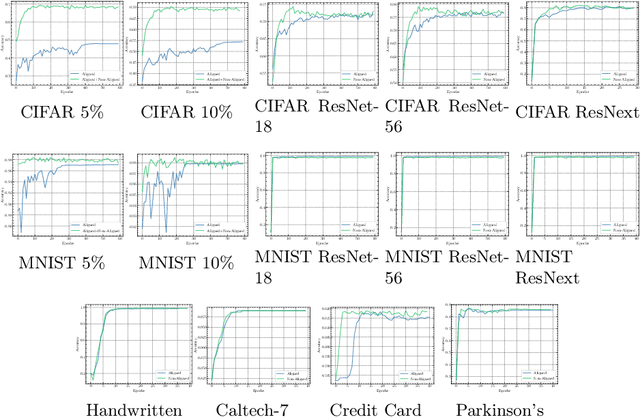
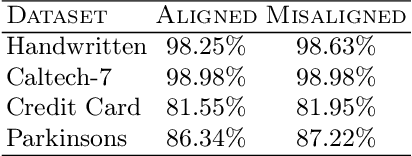
Vertical Federated Learning (VFL) is a machine learning paradigm for learning from vertically partitioned data (i.e. features for each input are distributed across multiple "guest" clients and an aggregating "host" server owns labels) without communicating raw data. Traditionally, VFL involves an "entity resolution" phase where the host identifies and serializes the unique entities known to all guests. This is followed by private set intersection to find common entities, and an "entity alignment" step to ensure all guests are always processing the same entity's data. However, using only data of entities from the intersection means guests discard potentially useful data. Besides, the effect on privacy is dubious and these operations are computationally expensive. We propose a novel approach that eliminates the need for set intersection and entity alignment in categorical tasks. Our Entity Augmentation technique generates meaningful labels for activations sent to the host, regardless of their originating entity, enabling efficient VFL without explicit entity alignment. With limited overlap between training data, this approach performs substantially better (e.g. with 5% overlap, 48.1% vs 69.48% test accuracy on CIFAR-10). In fact, thanks to the regularizing effect, our model performs marginally better even with 100% overlap.
Decoupled Vertical Federated Learning for Practical Training on Vertically Partitioned Data
Mar 06, 2024Vertical Federated Learning (VFL) is an emergent distributed machine learning paradigm wherein owners of disjoint features of a common set of entities collaborate to learn a global model without sharing data. In VFL, a host client owns data labels for each entity and learns a final representation based on intermediate local representations from all guest clients. Therefore, the host is a single point of failure and label feedback can be used by malicious guest clients to infer private features. Requiring all participants to remain active and trustworthy throughout the entire training process is generally impractical and altogether infeasible outside of controlled environments. We propose Decoupled VFL (DVFL), a blockwise learning approach to VFL. By training each model on its own objective, DVFL allows for decentralized aggregation and isolation between feature learning and label supervision. With these properties, DVFL is fault tolerant and secure. We implement DVFL to train split neural networks and show that model performance is comparable to VFL on a variety of classification datasets.
DiffClone: Enhanced Behaviour Cloning in Robotics with Diffusion-Driven Policy Learning
Jan 17, 2024



Robot learning tasks are extremely compute-intensive and hardware-specific. Thus the avenues of tackling these challenges, using a diverse dataset of offline demonstrations that can be used to train robot manipulation agents, is very appealing. The Train-Offline-Test-Online (TOTO) Benchmark provides a well-curated open-source dataset for offline training comprised mostly of expert data and also benchmark scores of the common offline-RL and behaviour cloning agents. In this paper, we introduce DiffClone, an offline algorithm of enhanced behaviour cloning agent with diffusion-based policy learning, and measured the efficacy of our method on real online physical robots at test time. This is also our official submission to the Train-Offline-Test-Online (TOTO) Benchmark Challenge organized at NeurIPS 2023. We experimented with both pre-trained visual representation and agent policies. In our experiments, we find that MOCO finetuned ResNet50 performs the best in comparison to other finetuned representations. Goal state conditioning and mapping to transitions resulted in a minute increase in the success rate and mean-reward. As for the agent policy, we developed DiffClone, a behaviour cloning agent improved using conditional diffusion.