 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Real-Time Pedestrian Detection on Embedded Devices
Dec 13, 2020
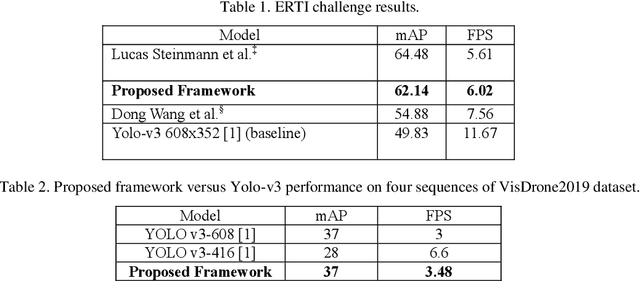
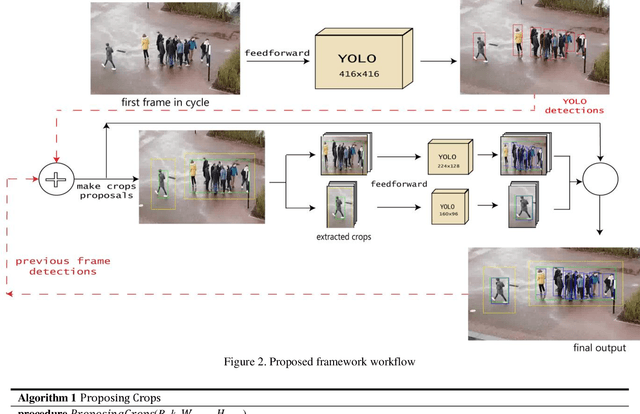
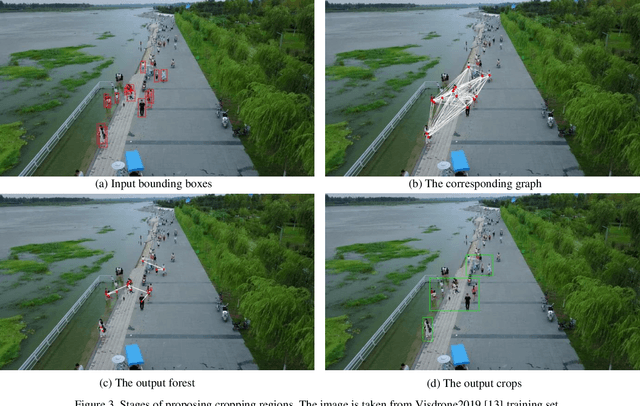
Detection of pedestrians on embedded devices, such as those on-board of robots and drones, has many applications including road intersection monitoring, security, crowd monitoring and surveillance, to name a few. However, the problem can be challenging due to continuously-changing camera viewpoint and varying object appearances as well as the need for lightweight algorithms suitable for embedded systems. This paper proposes a robust framework for pedestrian detection in many footages. The framework performs fine and coarse detections on different image regions and exploits temporal and spatial characteristics to attain enhanced accuracy and real time performance on embedded boards. The framework uses the Yolo-v3 object detection [1] as its backbone detector and runs on the Nvidia Jetson TX2 embedded board, however other detectors and/or boards can be used as well. The performance of the framework is demonstrated on two established datasets and its achievement of the second place in CVPR 2019 Embedded Real-Time Inference (ERTI) Challenge.
Robust Real-time Pedestrian Detection in Aerial Imagery on Jetson TX2
May 16, 2019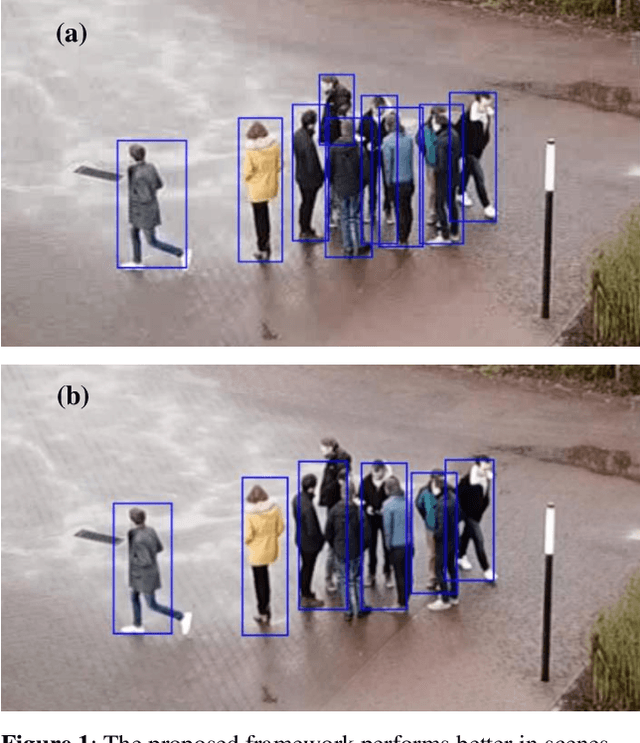
Detection of pedestrians in aerial imagery captured by drones has many applications including intersection monitoring, patrolling, and surveillance, to name a few. However, the problem is involved due to continuouslychanging camera viewpoint and object appearance as well as the need for lightweight algorithms to run on on-board embedded systems. To address this issue, the paper proposes a framework for pedestrian detection in videos based on the YOLO object detection network [6] while having a high throughput of more than 5 FPS on the Jetson TX2 embedded board. The framework exploits deep learning for robust operation and uses a pre-trained model without the need for any additional training which makes it flexible to apply on different setups with minimum amount of tuning. The method achieves ~81 mAP when applied on a sample video from the Embedded Real-Time Inference (ERTI) Challenge where pedestrians are monitored by a UAV.