 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVid2Real HRI: Align video-based HRI study designs with real-world settings
Mar 23, 2024



HRI research using autonomous robots in real-world settings can produce results with the highest ecological validity of any study modality, but many difficulties limit such studies' feasibility and effectiveness. We propose Vid2Real HRI, a research framework to maximize real-world insights offered by video-based studies. The Vid2Real HRI framework was used to design an online study using first-person videos of robots as real-world encounter surrogates. The online study ($n = 385$) distinguished the within-subjects effects of four robot behavioral conditions on perceived social intelligence and human willingness to help the robot enter an exterior door. A real-world, between-subjects replication ($n = 26$) using two conditions confirmed the validity of the online study's findings and the sufficiency of the participant recruitment target ($22$) based on a power analysis of online study results. The Vid2Real HRI framework offers HRI researchers a principled way to take advantage of the efficiency of video-based study modalities while generating directly transferable knowledge of real-world HRI. Code and data from the study are provided at https://vid2real.github.io/vid2realHRI
Influencing Incidental Human-Robot Encounters: Expressive movement improves pedestrians' impressions of a quadruped service robot
Nov 08, 2023

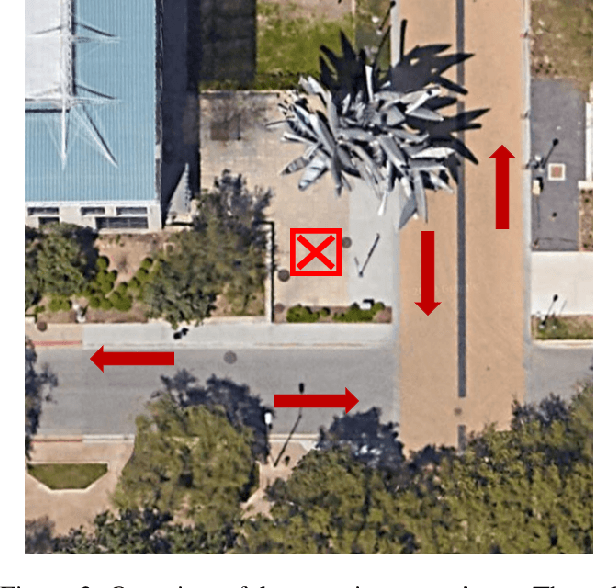

A single mobile service robot may generate hundreds of encounters with pedestrians, yet there is little published data on the factors influencing these incidental human-robot encounters. We report the results of a between-subjects experiment (n=222) testing the impact of robot body language, defined as non-functional modifications to robot movement, upon incidental pedestrian encounters with a quadruped service robot in a real-world setting. We find that canine-inspired body language had a positive influence on participants' perceptions of the robot compared to the robot's stock movement. This effect was visible across all questions of a questionnaire on the perceptions of robots (Godspeed). We argue that body language is a promising and practical design space for improving pedestrian encounters with service robots.