 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMitigating Exaggerated Safety in Large Language Models
May 08, 2024

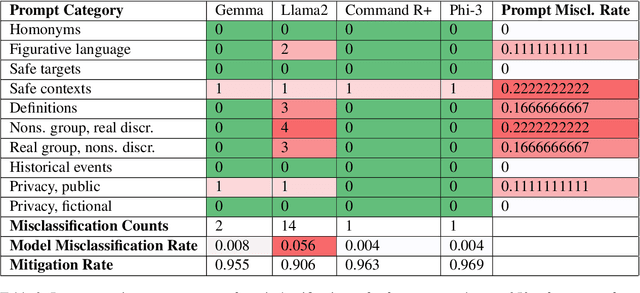
As the popularity of Large Language Models (LLMs) grow, combining model safety with utility becomes increasingly important. The challenge is making sure that LLMs can recognize and decline dangerous prompts without sacrificing their ability to be helpful. The problem of "exaggerated safety" demonstrates how difficult this can be. To reduce excessive safety behaviours -- which was discovered to be 26.1% of safe prompts being misclassified as dangerous and refused -- we use a combination of XSTest dataset prompts as well as interactive, contextual, and few-shot prompting to examine the decision bounds of LLMs such as Llama2, Gemma Command R+, and Phi-3. We find that few-shot prompting works best for Llama2, interactive prompting works best Gemma, and contextual prompting works best for Command R+ and Phi-3. Using a combination of these prompting strategies, we are able to mitigate exaggerated safety behaviors by an overall 92.9% across all LLMs. Our work presents a multiple prompting strategies to jailbreak LLMs' decision-making processes, allowing them to navigate the tight line between refusing unsafe prompts and remaining helpful.
Influencing Incidental Human-Robot Encounters: Expressive movement improves pedestrians' impressions of a quadruped service robot
Nov 08, 2023

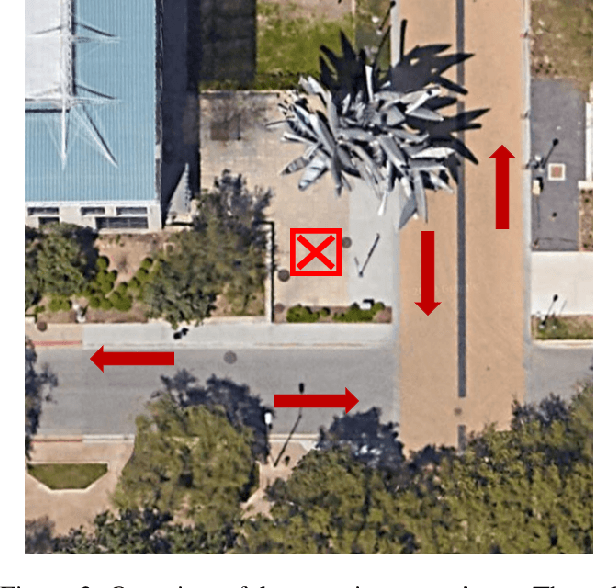

A single mobile service robot may generate hundreds of encounters with pedestrians, yet there is little published data on the factors influencing these incidental human-robot encounters. We report the results of a between-subjects experiment (n=222) testing the impact of robot body language, defined as non-functional modifications to robot movement, upon incidental pedestrian encounters with a quadruped service robot in a real-world setting. We find that canine-inspired body language had a positive influence on participants' perceptions of the robot compared to the robot's stock movement. This effect was visible across all questions of a questionnaire on the perceptions of robots (Godspeed). We argue that body language is a promising and practical design space for improving pedestrian encounters with service robots.