 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInfluencing Incidental Human-Robot Encounters: Expressive movement improves pedestrians' impressions of a quadruped service robot
Nov 08, 2023

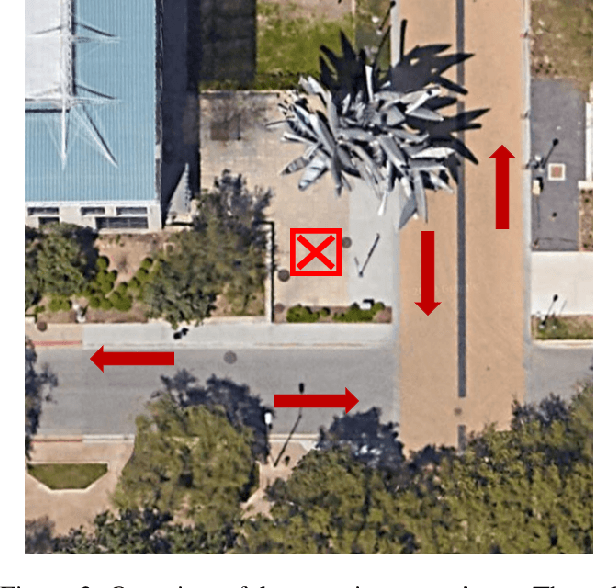

A single mobile service robot may generate hundreds of encounters with pedestrians, yet there is little published data on the factors influencing these incidental human-robot encounters. We report the results of a between-subjects experiment (n=222) testing the impact of robot body language, defined as non-functional modifications to robot movement, upon incidental pedestrian encounters with a quadruped service robot in a real-world setting. We find that canine-inspired body language had a positive influence on participants' perceptions of the robot compared to the robot's stock movement. This effect was visible across all questions of a questionnaire on the perceptions of robots (Godspeed). We argue that body language is a promising and practical design space for improving pedestrian encounters with service robots.