 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMean Field Game-Based Interactive Trajectory Planning Using Physics-Inspired Unified Potential Fields
Sep 09, 2025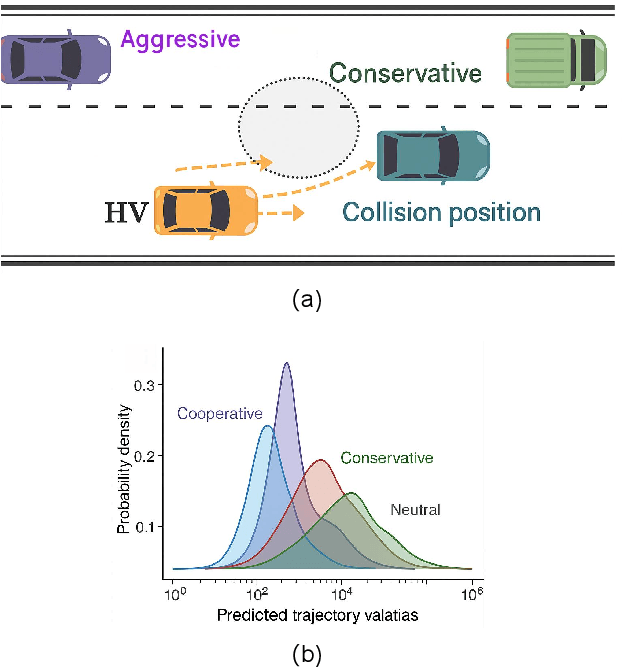
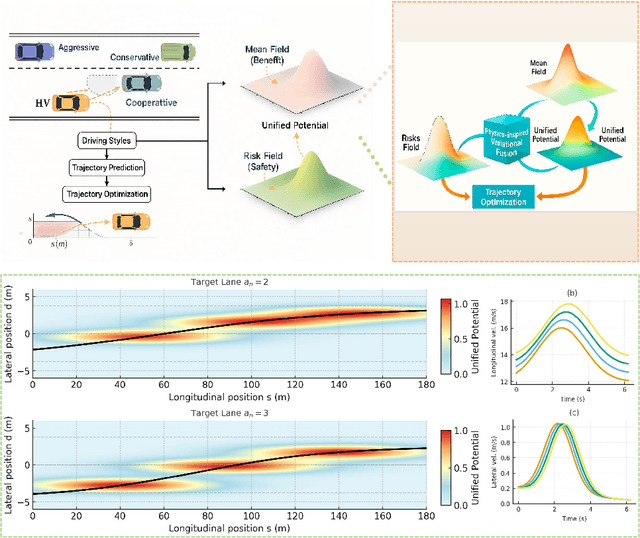
Interactive trajectory planning in autonomous driving must balance safety, efficiency, and scalability under heterogeneous driving behaviors. Existing methods often face high computational cost or rely on external safety critics. To address this, we propose an Interaction-Enriched Unified Potential Field (IUPF) framework that fuses style-dependent benefit and risk fields through a physics-inspired variational model, grounded in mean field game theory. The approach captures conservative, aggressive, and cooperative behaviors without additional safety modules, and employs stochastic differential equations to guarantee Nash equilibrium with exponential convergence. Simulations on lane changing and overtaking scenarios show that IUPF ensures safe distances, generates smooth and efficient trajectories, and outperforms traditional optimization and game-theoretic baselines in both adaptability and computational efficiency.
Attention and Risk-Aware Decision Framework for Safe Autonomous Driving
Sep 09, 2025Autonomous driving has attracted great interest due to its potential capability in full-unsupervised driving. Model-based and learning-based methods are widely used in autonomous driving. Model-based methods rely on pre-defined models of the environment and may struggle with unforeseen events. Proximal policy optimization (PPO), an advanced learning-based method, can adapt to the above limits by learning from interactions with the environment. However, existing PPO faces challenges with poor training results, and low training efficiency in long sequences. Moreover, the poor training results are equivalent to collisions in driving tasks. To solve these issues, this paper develops an improved PPO by introducing the risk-aware mechanism, a risk-attention decision network, a balanced reward function, and a safety-assisted mechanism. The risk-aware mechanism focuses on highlighting areas with potential collisions, facilitating safe-driving learning of the PPO. The balanced reward function adjusts rewards based on the number of surrounding vehicles, promoting efficient exploration of the control strategy during training. Additionally, the risk-attention network enhances the PPO to hold channel and spatial attention for the high-risk areas of input images. Moreover, the safety-assisted mechanism supervises and prevents the actions with risks of collisions during the lane keeping and lane changing. Simulation results on a physical engine demonstrate that the proposed algorithm outperforms benchmark algorithms in collision avoidance, achieving higher peak reward with less training time, and shorter driving time remaining on the risky areas among multiple testing traffic flow scenarios.
Design, modeling, and characteristics of ringshaped robot actuated by functional fluid
Jun 12, 2024



The controlled actuation of hydraulic and pneumatic actuators has unveiled fresh and thrilling opportunities for designing mobile robots with adaptable structures. Previously reported rolling robots, which were powered by fluidic systems, often relied on complex principles, cumbersome pump and valve systems, and intricate control strategies, limiting their applicability in other fields. In this investigation, we employed a distinct category of functional fluid identified as Electrohydrodynamic (EHD) fluid, serving as the pivotal element within the ring-shaped actuator. A short stream of functional fluid is placed within a fluidic channel and is then actuated by applying a direct current voltage aiming at shifting the center of mass of the robot and finally pushed the actuator to roll. We designed a ring-shaped fluidic robot, manufactured it using digital machining methods, and evaluated the robot's characteristics. Furthermore, we developed static and dynamic models to analyze the oscillation and rolling motion of the ring-shaped robots using the Lagrange method. This study is anticipated to contribute to the expansion of current research on EHD flexible actuators, enabling the realization of complex robotic systems.
Predictive Modeling of Flexible EHD Pumps using Kolmogorov-Arnold Networks
May 13, 2024


We present a novel approach to predicting the pressure and flow rate of flexible electrohydrodynamic pumps using the Kolmogorov-Arnold Network. Inspired by the Kolmogorov-Arnold representation theorem, KAN replaces fixed activation functions with learnable spline-based activation functions, enabling it to approximate complex nonlinear functions more effectively than traditional models like Multi-Layer Perceptron and Random Forest. We evaluated KAN on a dataset of flexible EHD pump parameters and compared its performance against RF, and MLP models. KAN achieved superior predictive accuracy, with Mean Squared Errors of 12.186 and 0.001 for pressure and flow rate predictions, respectively. The symbolic formulas extracted from KAN provided insights into the nonlinear relationships between input parameters and pump performance. These findings demonstrate that KAN offers exceptional accuracy and interpretability, making it a promising alternative for predictive modeling in electrohydrodynamic pumping.
Integration of Large Language Models in Control of EHD Pumps for Precise Color Synthesis
Jan 21, 2024
This paper presents an innovative approach to integrating Large Language Models (LLMs) with Arduino-controlled Electrohydrodynamic (EHD) pumps for precise color synthesis in automation systems. We propose a novel framework that employs fine-tuned LLMs to interpret natural language commands and convert them into specific operational instructions for EHD pump control. This approach aims to enhance user interaction with complex hardware systems, making it more intuitive and efficient. The methodology involves four key steps: fine-tuning the language model with a dataset of color specifications and corresponding Arduino code, developing a natural language processing interface, translating user inputs into executable Arduino code, and controlling EHD pumps for accurate color mixing. Conceptual experiment results, based on theoretical assumptions, indicate a high potential for accurate color synthesis, efficient language model interpretation, and reliable EHD pump operation. This research extends the application of LLMs beyond text-based tasks, demonstrating their potential in industrial automation and control systems. While highlighting the limitations and the need for real-world testing, this study opens new avenues for AI applications in physical system control and sets a foundation for future advancements in AI-driven automation technologies.