 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn exact coverage path planning algorithm for UAV-based search and rescue operations
May 18, 2024Unmanned aerial vehicles (UAVs) are increasingly utilized in global search and rescue efforts, enhancing operational efficiency. In these missions, a coordinated swarm of UAVs is deployed to efficiently cover expansive areas by capturing and analyzing aerial imagery and footage. Rapid coverage is paramount in these scenarios, as swift discovery can mean the difference between life and death for those in peril. This paper focuses on optimizing flight path planning for multiple UAVs in windy conditions to efficiently cover rectangular search areas in minimal time. We address this challenge by dividing the search area into a grid network and formulating it as a mixed-integer program (MIP). Our research introduces a precise lower bound for the objective function and an exact algorithm capable of finding either the optimal solution or a near-optimal solution with a constant absolute gap to optimality. Notably, as the problem complexity increases, our solution exhibits a diminishing relative optimality gap while maintaining negligible computational costs compared to the MIP approach.
bsnsing: A decision tree induction method based on recursive optimal boolean rule composition
May 30, 2022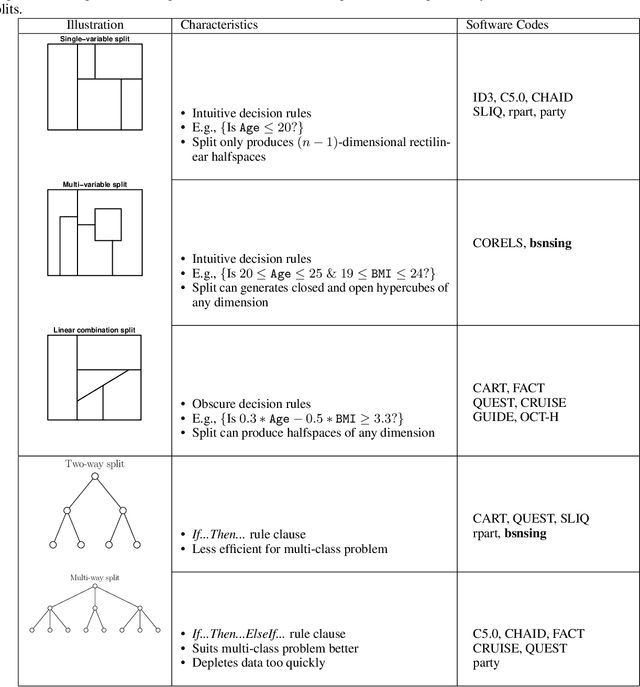
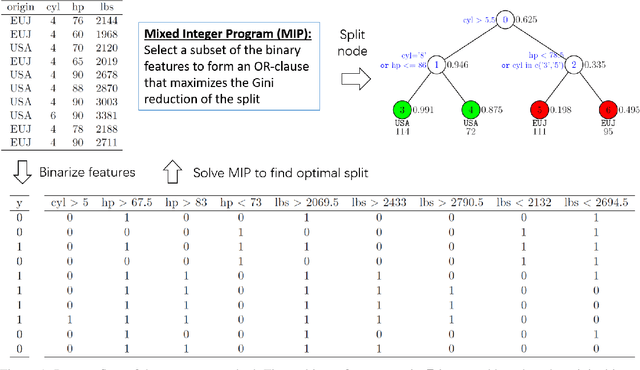


This paper proposes a new mixed-integer programming (MIP) formulation to optimize split rule selection in the decision tree induction process, and develops an efficient search algorithm that is able to solve practical instances of the MIP model faster than commercial solvers. The formulation is novel for it directly maximizes the Gini reduction, an effective split selection criterion which has never been modeled in a mathematical program for its nonconvexity. The proposed approach differs from other optimal classification tree models in that it does not attempt to optimize the whole tree, therefore the flexibility of the recursive partitioning scheme is retained and the optimization model is more amenable. The approach is implemented in an open-source R package named bsnsing. Benchmarking experiments on 75 open data sets suggest that bsnsing trees are the most capable of discriminating new cases compared to trees trained by other decision tree codes including the rpart, C50, party and tree packages in R. Compared to other optimal decision tree packages, including DL8.5, OSDT, GOSDT and indirectly more, bsnsing stands out in its training speed, ease of use and broader applicability without losing in prediction accuracy.
Risk-bounded Path Planning for Urban Air Mobility Operations under Uncertainty
Sep 10, 2021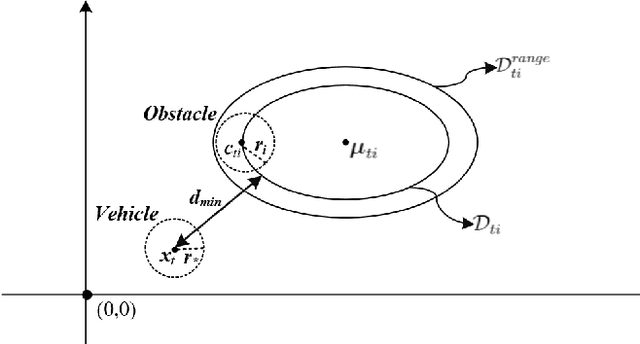
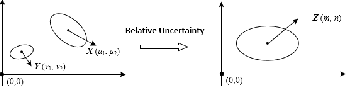
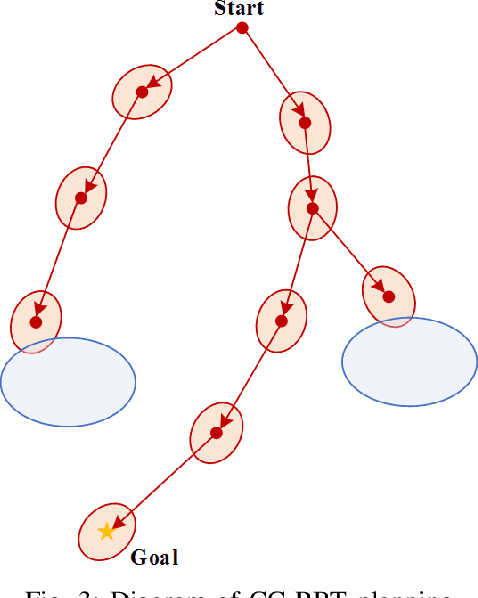
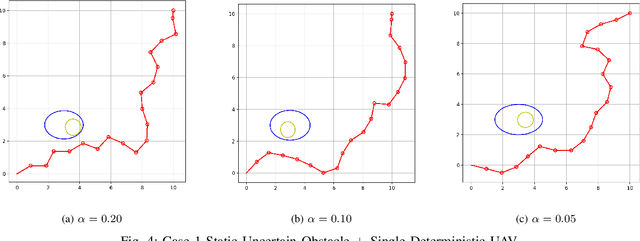
Collision avoidance is an essential concern for the autonomous operations of aerial vehicles in dynamic and uncertain urban environments. This paper introduces a risk-bounded path planning algorithm for unmanned aerial vehicles (UAVs) operating in such environments. This algorithm advances the rapidly-exploring random tree (RRT) with chance constraints to generate probabilistically guaranteed collision-free paths that are robust to vehicle and environmental obstacle uncertainties. Assuming all uncertainties follow Gaussian distributions, the chance constraints are established through converting dynamic and probabilistic constraints into equivalent static and deterministic constraints. By incorporating chance constraints into the RRT algorithm, the proposed algorithm not only inherits the computational advantage of sampling-based algorithms but also guarantees a probabilistically feasible flying zone at every time step. Simulation results show the promising performance of the proposed algorithm.