 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Adaptive Method for Target Curve Selection
Dec 09, 2025In this paper, we introduce an adaptation of the "Interactive Differential Evolution" (IDE) algorithm to the audio domain for the task of identifying the preferred over-the-ear headphone frequency response target among consumers. The method is based on data collection using an adaptive paired rating listening test paradigm (paired comparison with a scale). The IDE algorithm and its parameters are explained in detail. Additionally, data collected from three listening experiments with more than 20 consumers is presented, and the algorithm's performance in this untested domain is investigated on the basis of two convergence measures. The results indicate that this method can converge and may ease the task of 'extracting' frequency response preference from untrained consumers.
GARA: A novel approach to Improve Genetic Algorithms' Accuracy and Efficiency by Utilizing Relationships among Genes
Apr 28, 2024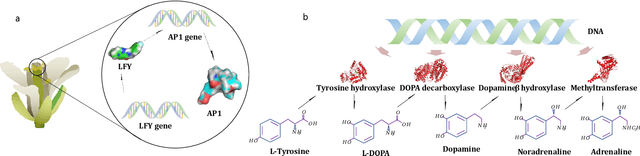
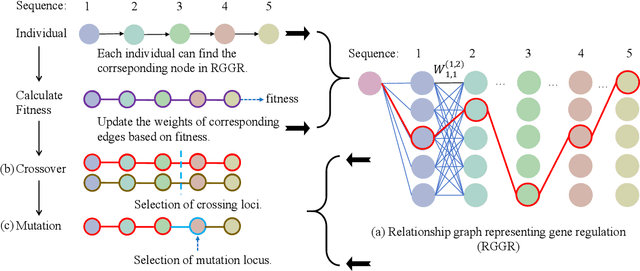
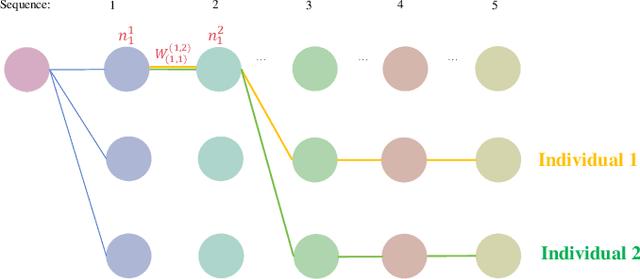
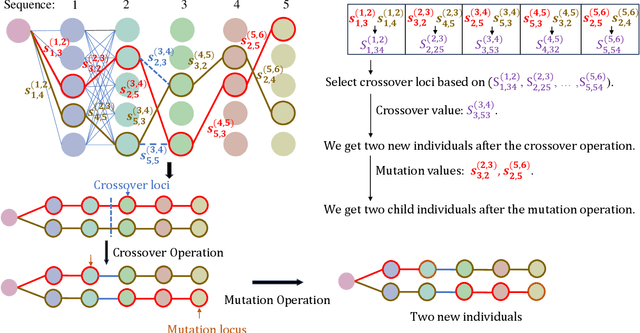
Genetic algorithms have played an important role in engineering optimization. Traditional GAs treat each gene separately. However, biophysical studies of gene regulatory networks revealed direct associations between different genes. It inspires us to propose an improvement to GA in this paper, Gene Regulatory Genetic Algorithm (GRGA), which, to our best knowledge, is the first time to utilize relationships among genes for improving GA's accuracy and efficiency. We design a directed multipartite graph encapsulating the solution space, called RGGR, where each node corresponds to a gene in the solution and the edge represents the relationship between adjacent nodes. The edge's weight reflects the relationship degree and is updated based on the idea that the edges' weights in a complete chain as candidate solution with acceptable or unacceptable performance should be strengthened or reduced, respectively. The obtained RGGR is then employed to determine appropriate loci of crossover and mutation operators, thereby directing the evolutionary process toward faster and better convergence. We analyze and validate our proposed GRGA approach in a single-objective multimodal optimization problem, and further test it on three types of applications, including feature selection, text summarization, and dimensionality reduction. Results illustrate that our GARA is effective and promising.
Sonic: A Sampling-based Online Controller for Streaming Applications
Aug 15, 2021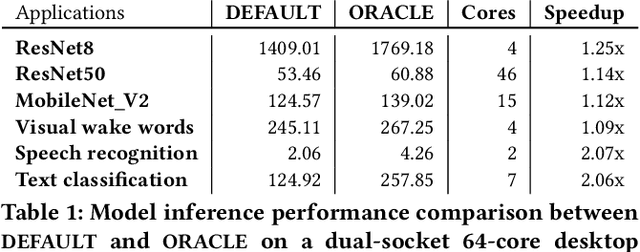
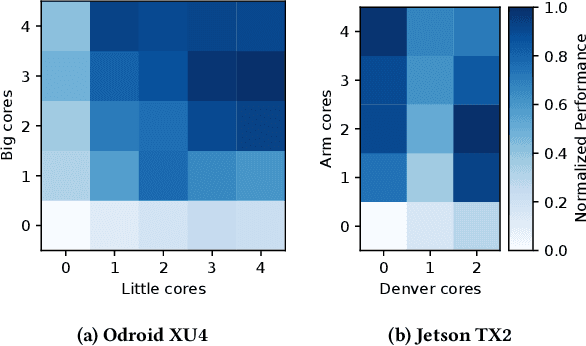
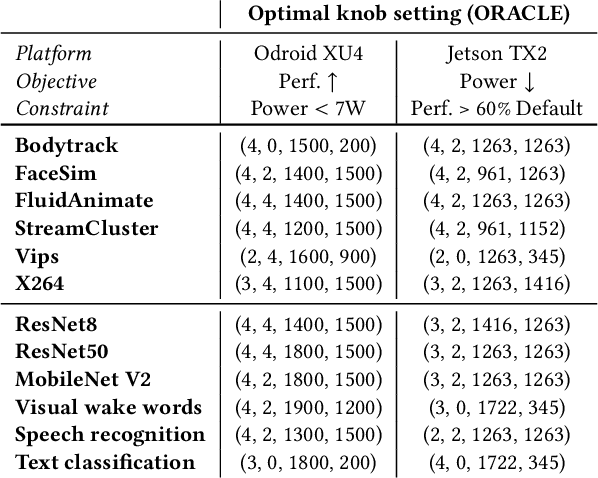
Many applications in important problem domains such as machine learning and computer vision are streaming applications that take a sequence of inputs over time. It is challenging to find knob settings that optimize the run-time performance of such applications because the optimal knob settings are usually functions of inputs, computing platforms, time as well as user's requirements, which can be very diverse. Most prior works address this problem by offline profiling followed by training models for control. However, profiling-based approaches incur large overhead before execution; it is also difficult to redeploy them in other run-time configurations. In this paper, we propose Sonic, a sampling-based online controller for long-running streaming applications that does not require profiling ahead of time. Within each phase of a streaming application's execution, Sonic utilizes the beginning portion to sample the knob space strategically and aims to pick the optimal knob setting for the rest of the phase, given a user-specified constrained optimization problem. A hybrid approach of machine learning regressions and Bayesian optimization are used for better overall sampling choices. Sonic is implemented independent of application, device, input, performance objective and constraints. We evaluate Sonic on traditional parallel benchmarks as well as on deep learning inference benchmarks across multiple platforms. Our experiments show that when using Sonic to control knob settings, application run-time performance is only 5.3% less than if optimal knob settings were used, demonstrating that Sonic is able to find near-optimal knob settings under diverse run-time configurations without prior knowledge quickly.
SLAMBooster: An Application-aware Controller for Approximation in SLAM
Nov 05, 2018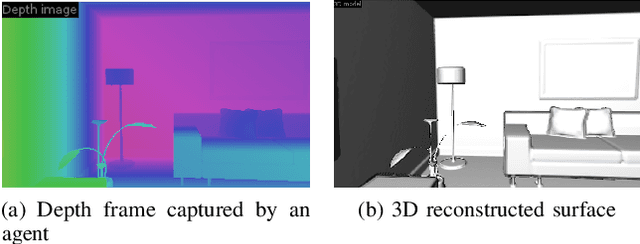
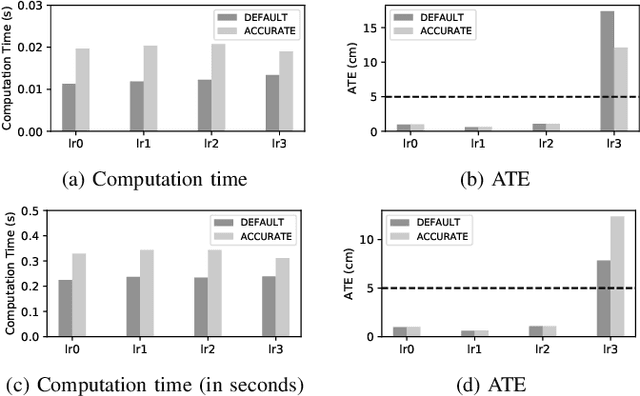
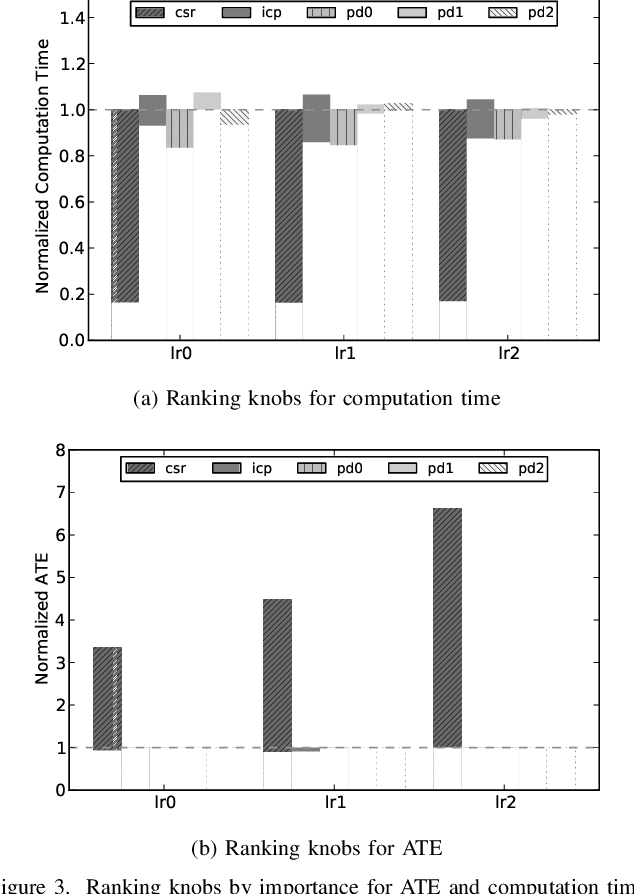
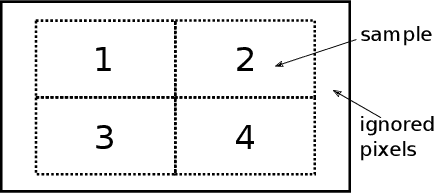
Simultaneous Localization and Mapping (SLAM) is the problem of constructing a map of an agent's environment while localizing or tracking the mobile agent's position and orientation within the map. Algorithms for SLAM have high computational requirements, which has hindered their use on embedded devices. Approximation can be used to reduce the time and energy requirements of SLAM implementations as long as the approximations do not prevent the agent from navigating correctly through the environment. Previous studies of approximation in SLAM have assumed that the entire trajectory of the agent is known before the agent starts to move, and they have focused on offline controllers that use features of the trajectory to set approximation knobs at the start of the trajectory. In practice, the trajectory is not usually known ahead of time, and allowing knob settings to change dynamically opens up more opportunities for reducing computation time and energy. We describe SLAMBooster, an application-aware online control system for SLAM that adaptively controls approximation knobs during the motion of the agent. SLAMBooster is based on a control technique called hierarchical proportional control but our experiments showed this application-agnostic control led to an unacceptable reduction in the quality of localization. To address this problem, SLAMBooster exploits domain knowledge: it uses features extracted from input frames and from the estimated motion of the agent in its algorithm for controlling approximation. We implemented SLAMBooster in the open-source SLAMBench framework. Our experiments show that SLAMBooster reduces the computation time and energy consumption by around half on the average on an embedded platform, while maintaining the accuracy of the localization within reasonable bounds. These improvements make it feasible to deploy SLAM on a wider range of devices.