 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-Time Visual Tracking: Promoting the Robustness of Correlation Filter Learning
Sep 09, 2016
Correlation filtering based tracking model has received lots of attention and achieved great success in real-time tracking, however, the lost function in current correlation filtering paradigm could not reliably response to the appearance changes caused by occlusion and illumination variations. This study intends to promote the robustness of the correlation filter learning. By exploiting the anisotropy of the filter response, three sparsity related loss functions are proposed to alleviate the overfitting issue of previous methods and improve the overall tracking performance. As a result, three real-time trackers are implemented. Extensive experiments in various challenging situations demonstrate that the robustness of the learned correlation filter has been greatly improved via the designed loss functions. In addition, the study reveals, from an experimental perspective, how different loss functions essentially influence the tracking performance. An important conclusion is that the sensitivity of the peak values of the filter in successive frames is consistent with the tracking performance. This is a useful reference criterion in designing a robust correlation filter for visual tracking.
Tracking Completion
Sep 09, 2016


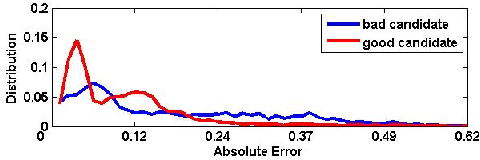
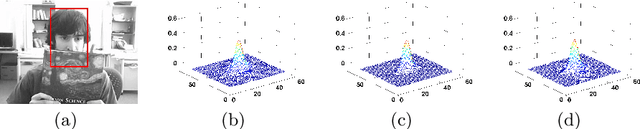
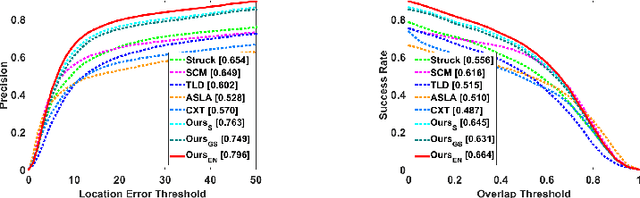
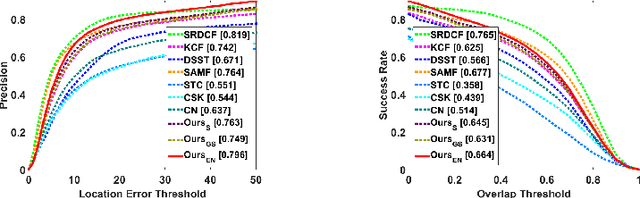
A fundamental component of modern trackers is an online learned tracking model, which is typically modeled either globally or locally. The two kinds of models perform differently in terms of effectiveness and robustness under different challenging situations. This work exploits the advantages of both models. A subspace model, from a global perspective, is learned from previously obtained targets via rank-minimization to address the tracking, and a pixel-level local observation is leveraged si- multaneously, from a local point of view, to augment the subspace model. A matrix completion method is employed to integrate the two models. Unlike previous tracking methods, which locate the target among all fully observed target candidates, the proposed approach first estimates an expected target via the matrix completion through partially observed target candidates, and then, identifies the target according to the estimation accuracy with respect to the target candidates. Specifically, the tracking is formulated as a problem of target appearance estimation. Extensive experiments on various challenging video sequences verify the effectiveness of the proposed approach and demonstrate that the proposed tracker outperforms other popular state-of-the-art trackers.