 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSequential Plan Recognition
Mar 03, 2017



Plan recognition algorithms infer agents' plans from their observed actions. Due to imperfect knowledge about the agent's behavior and the environment, it is often the case that there are multiple hypotheses about an agent's plans that are consistent with the observations, though only one of these hypotheses is correct. This paper addresses the problem of how to disambiguate between hypotheses, by querying the acting agent about whether a candidate plan in one of the hypotheses matches its intentions. This process is performed sequentially and used to update the set of possible hypotheses during the recognition process. The paper defines the sequential plan recognition process (SPRP), which seeks to reduce the number of hypotheses using a minimal number of queries. We propose a number of policies for the SPRP which use maximum likelihood and information gain to choose which plan to query. We show this approach works well in practice on two domains from the literature, significantly reducing the number of hypotheses using fewer queries than a baseline approach. Our results can inform the design of future plan recognition systems that interleave the recognition process with intelligent interventions of their users.
SLIM: Semi-Lazy Inference Mechanism for Plan Recognition
Mar 02, 2017

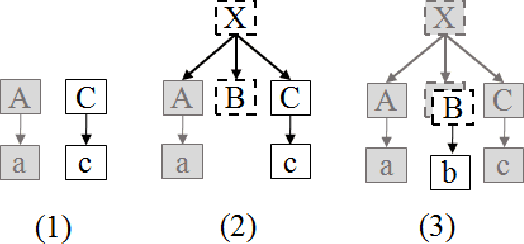

Plan Recognition algorithms require to recognize a complete hierarchy explaining the agent's actions and goals. While the output of such algorithms is informative to the recognizer, the cost of its calculation is high in run-time, space, and completeness. Moreover, performing plan recognition online requires the observing agent to reason about future actions that have not yet been seen and maintain a set of hypotheses to support all possible options. This paper presents a new and efficient algorithm for online plan recognition called SLIM (Semi-Lazy Inference Mechanism). It combines both a bottom-up and top-down parsing processes, which allow it to commit only to the minimum necessary actions in real-time, but still provide complete hypotheses post factum. We show both theoretically and empirically that although the computational cost of this process is still exponential, there is a significant improvement in run-time when compared to a state of the art of plan recognition algorithm.