 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSLIM: Semi-Lazy Inference Mechanism for Plan Recognition
Mar 02, 2017

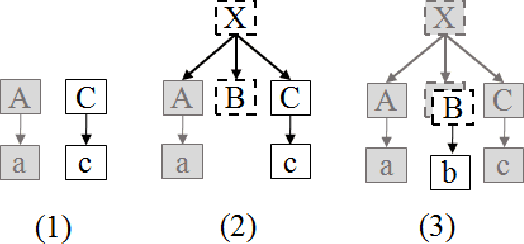

Plan Recognition algorithms require to recognize a complete hierarchy explaining the agent's actions and goals. While the output of such algorithms is informative to the recognizer, the cost of its calculation is high in run-time, space, and completeness. Moreover, performing plan recognition online requires the observing agent to reason about future actions that have not yet been seen and maintain a set of hypotheses to support all possible options. This paper presents a new and efficient algorithm for online plan recognition called SLIM (Semi-Lazy Inference Mechanism). It combines both a bottom-up and top-down parsing processes, which allow it to commit only to the minimum necessary actions in real-time, but still provide complete hypotheses post factum. We show both theoretically and empirically that although the computational cost of this process is still exponential, there is a significant improvement in run-time when compared to a state of the art of plan recognition algorithm.