 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeObject Concepts Emerge from Motion
May 27, 2025Object concepts play a foundational role in human visual cognition, enabling perception, memory, and interaction in the physical world. Inspired by findings in developmental neuroscience - where infants are shown to acquire object understanding through observation of motion - we propose a biologically inspired framework for learning object-centric visual representations in an unsupervised manner. Our key insight is that motion boundary serves as a strong signal for object-level grouping, which can be used to derive pseudo instance supervision from raw videos. Concretely, we generate motion-based instance masks using off-the-shelf optical flow and clustering algorithms, and use them to train visual encoders via contrastive learning. Our framework is fully label-free and does not rely on camera calibration, making it scalable to large-scale unstructured video data. We evaluate our approach on three downstream tasks spanning both low-level (monocular depth estimation) and high-level (3D object detection and occupancy prediction) vision. Our models outperform previous supervised and self-supervised baselines and demonstrate strong generalization to unseen scenes. These results suggest that motion-induced object representations offer a compelling alternative to existing vision foundation models, capturing a crucial but overlooked level of abstraction: the visual instance. The corresponding code will be released upon paper acceptance.
Deep Planar Parallax for Monocular Depth Estimation
Jan 09, 2023

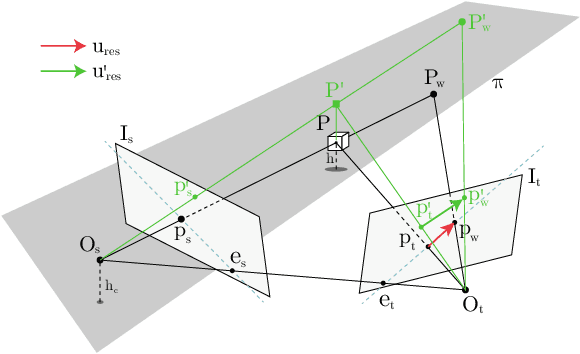

Depth estimation is a fundamental problem in the perception system of autonomous driving scenes. Although autonomous driving is challenging, much prior knowledge can still be utilized, by which the sophistication of the problem can be effectively restricted. Some previous works introduce the road plane prior to the depth estimation problem according to the Planar Parallax Geometry. However, we find that their usages are not effective, leaving the network cannot learn the geometric information. To this end, we analyze this problem in detail and reveal that explicit warping of consecutive frames and flow pre-training can effectively bring the geometric prior into learning. Furthermore, we propose Planar Position Embedding to deal with the intrinsic weakness of plane parallax geometry. Comprehensive experimental results on autonomous driving datasets like KITTI and Waymo Open Dataset (WOD) demonstrate that our Planar Parallax Network(PPNet) dramatically outperforms existing learning-based methods.