 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeClean-Annotation Backdoor Attack against Lane Detection Systems in the Wild
Mar 02, 2022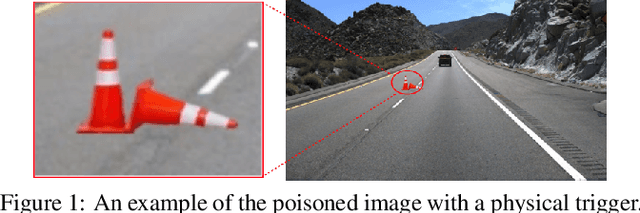
We present the first backdoor attack against the lane detection systems in the physical world. Modern autonomous vehicles adopt various deep learning methods to train lane detection models, making it challenging to devise a universal backdoor attack technique. In our solution, (1) we propose a novel semantic trigger design, which leverages the traffic cones with specific poses and locations to activate the backdoor. Such trigger can be easily realized under the physical setting, and looks very natural not to be detected. (2) We introduce a new clean-annotation approach to generate poisoned samples. These samples have correct annotations but are still capable of embedding the backdoor to the model. Comprehensive evaluations on public datasets and physical autonomous vehicles demonstrate that our backdoor attack is effective, stealthy and robust.