 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePrecipitation Nowcasting Using Diffusion Transformer with Causal Attention
Oct 17, 2024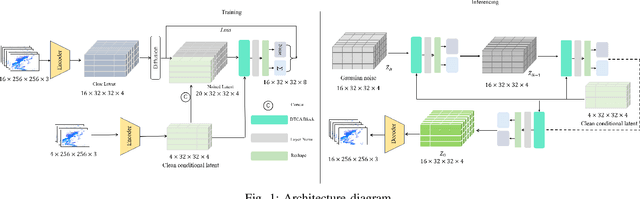
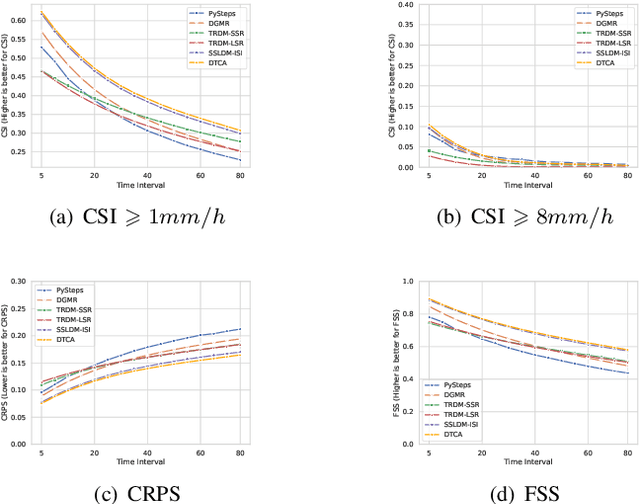

Short-term precipitation forecasting remains challenging due to the difficulty in capturing long-term spatiotemporal dependencies. Current deep learning methods fall short in establishing effective dependencies between conditions and forecast results, while also lacking interpretability. To address this issue, we propose a Precipitation Nowcasting Using Diffusion Transformer with Causal Attention model. Our model leverages Transformer and combines causal attention mechanisms to establish spatiotemporal queries between conditional information (causes) and forecast results (results). This design enables the model to effectively capture long-term dependencies, allowing forecast results to maintain strong causal relationships with input conditions over a wide range of time and space. We explore four variants of spatiotemporal information interactions for DTCA, demonstrating that global spatiotemporal labeling interactions yield the best performance. In addition, we introduce a Channel-To-Batch shift operation to further enhance the model's ability to represent complex rainfall dynamics. We conducted experiments on two datasets. Compared to state-of-the-art U-Net-based methods, our approach improved the CSI (Critical Success Index) for predicting heavy precipitation by approximately 15% and 8% respectively, achieving state-of-the-art performance.
Two-stage Rainfall-Forecasting Diffusion Model
Feb 20, 2024Deep neural networks have made great achievements in rainfall prediction.However, the current forecasting methods have certain limitations, such as with blurry generated images and incorrect spatial positions. To overcome these challenges, we propose a Two-stage Rainfall-Forecasting Diffusion Model (TRDM) aimed at improving the accuracy of long-term rainfall forecasts and addressing the imbalance in performance between temporal and spatial modeling. TRDM is a two-stage method for rainfall prediction tasks. The task of the first stage is to capture robust temporal information while preserving spatial information under low-resolution conditions. The task of the second stage is to reconstruct the low-resolution images generated in the first stage into high-resolution images. We demonstrate state-of-the-art results on the MRMS and Swedish radar datasets. Our project is open source and available on GitHub at: \href{https://github.com/clearlyzerolxd/TRDM}{https://github.com/clearlyzerolxd/TRDM}.