 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCentroid Distance Keypoint Detector for Colored Point Clouds
Oct 04, 2022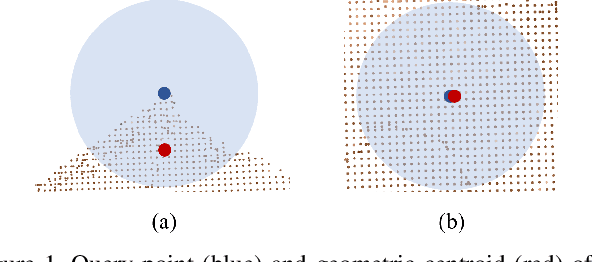
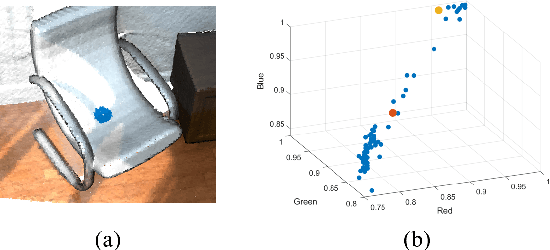
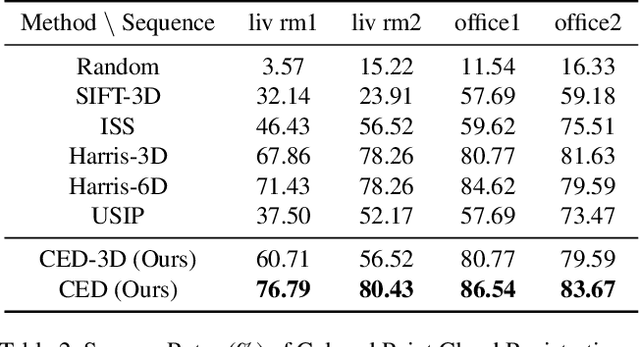
Keypoint detection serves as the basis for many computer vision and robotics applications. Despite the fact that colored point clouds can be readily obtained, most existing keypoint detectors extract only geometry-salient keypoints, which can impede the overall performance of systems that intend to (or have the potential to) leverage color information. To promote advances in such systems, we propose an efficient multi-modal keypoint detector that can extract both geometry-salient and color-salient keypoints in colored point clouds. The proposed CEntroid Distance (CED) keypoint detector comprises an intuitive and effective saliency measure, the centroid distance, that can be used in both 3D space and color space, and a multi-modal non-maximum suppression algorithm that can select keypoints with high saliency in two or more modalities. The proposed saliency measure leverages directly the distribution of points in a local neighborhood and does not require normal estimation or eigenvalue decomposition. We evaluate the proposed method in terms of repeatability and computational efficiency (i.e. running time) against state-of-the-art keypoint detectors on both synthetic and real-world datasets. Results demonstrate that our proposed CED keypoint detector requires minimal computational time while attaining high repeatability. To showcase one of the potential applications of the proposed method, we further investigate the task of colored point cloud registration. Results suggest that our proposed CED detector outperforms state-of-the-art handcrafted and learning-based keypoint detectors in the evaluated scenes. The C++ implementation of the proposed method is made publicly available at https://github.com/UCR-Robotics/CED_Detector.
Task Planning on Stochastic Aisle Graphs for Precision Agriculture
Feb 03, 2021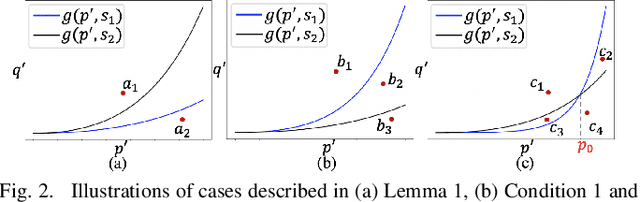
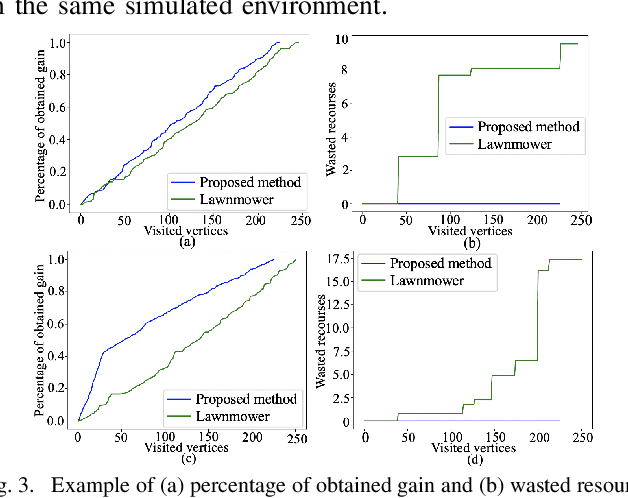
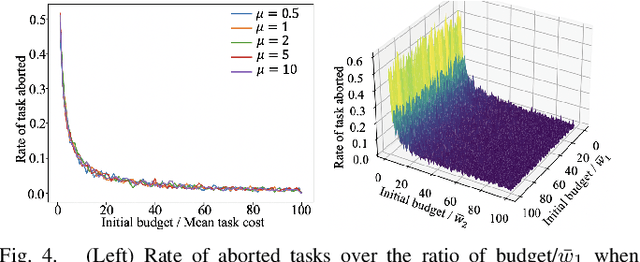
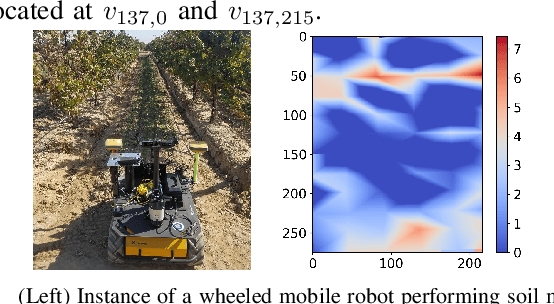
This work addresses task planning under uncertainty for precision agriculture applications whereby task costs are uncertain and the gain of completing a task is proportional to resource consumption (such as water consumption in precision irrigation). The goal is to complete all tasks while prioritizing those that are more urgent, and subject to diverse budget thresholds and stochastic costs for tasks. To describe agriculture-related environments that incorporate stochastic costs to complete tasks, a new Stochastic-Vertex-Cost Aisle Graph (SAG) is introduced. Then, a task allocation algorithm, termed Next-Best-Action Planning (NBA-P), is proposed. NBA-P utilizes the underlying structure enabled by SAG, and tackles the task planning problem by simultaneously determining the optimal tasks to perform and an optimal time to exit (i.e. return to a base station), at run-time. The proposed approach is tested with both simulated data and real-world experimental datasets collected in a commercial vineyard, in both single- and multi-robot scenarios. In all cases, NBA-P outperforms other evaluated methods in terms of return per visited vertex, wasted resources resulting from aborted tasks (i.e. when a budget threshold is exceeded), and total visited vertices.
Online Exploration and Coverage Planning in Unknown Obstacle-Cluttered Environments
Jun 30, 2020
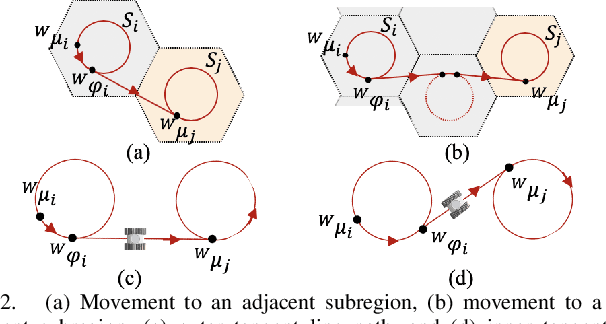


Online coverage planning can be useful in applications like field monitoring and search and rescue. Without prior information of the environment, achieving resolution-complete coverage considering the non-holonomic mobility constraints in commonly-used vehicles (e.g., wheeled robots) remains a challenge. In this paper, we propose a hierarchical, hex-decomposition-based coverage planning algorithm for unknown, obstacle-cluttered environments. The proposed approach ensures resolution-complete coverage, can be tuned to achieve fast exploration, and plans smooth paths for Dubins vehicles to follow at constant velocity in real-time. Gazebo simulations and hardware experiments with a non-holonomic wheeled robot show that our approach can successfully tradeoff between coverage and exploration speed and can outperform existing online coverage algorithms in terms of total covered area or exploration speed according to how it is tuned.