 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComparison of Centralized and Decentralized Approaches in Cooperative Coverage Problems with Energy-Constrained Agents
Aug 26, 2020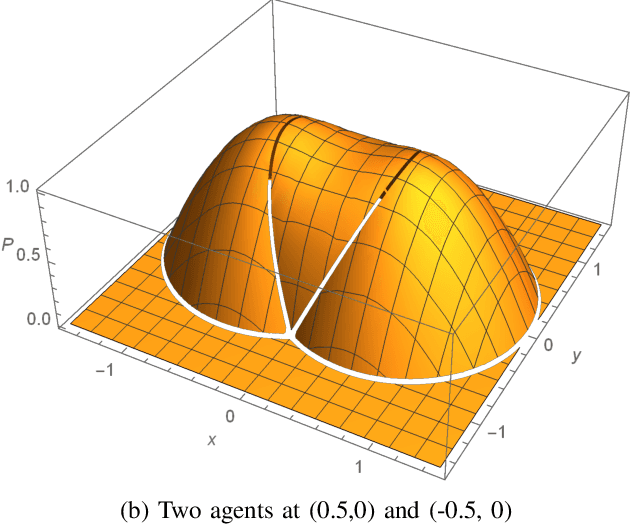
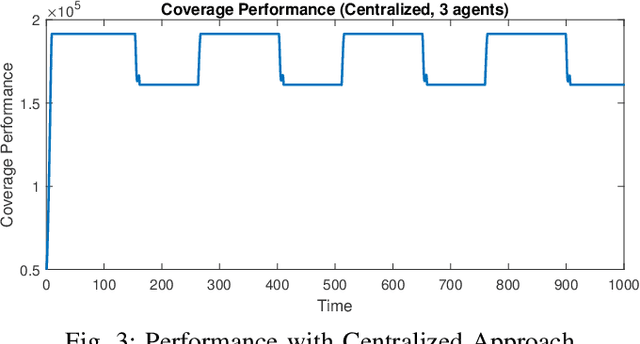
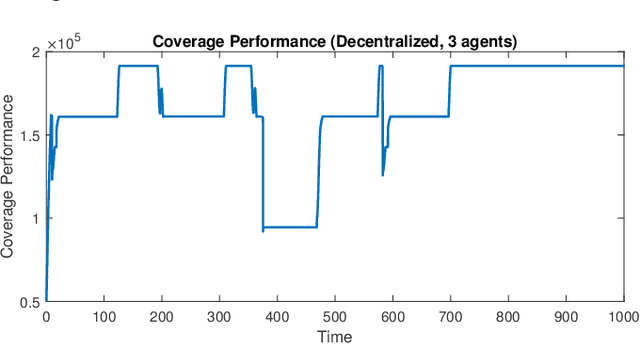
A multi-agent coverage problem is considered with energy-constrained agents. The objective of this paper is to compare the coverage performance between centralized and decentralized approaches. To this end, a near-optimal centralized coverage control method is developed under energy depletion and repletion constraints. The optimal coverage formation corresponds to the locations of agents where the coverage performance is maximized. The optimal charging formation corresponds to the locations of agents with one agent fixed at the charging station and the remaining agents maximizing the coverage performance. We control the behavior of this cooperative multi-agent system by switching between the optimal coverage formation and the optimal charging formation. Finally, the optimal dwell times at coverage locations, charging time, and agent trajectories are determined so as to maximize coverage over a given time interval. In particular, our controller guarantees that at any time there is at most one agent leaving the team for energy repletion.