 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Data-Driven Reinforcement Learning Solution Framework for Optimal and Adaptive Personalization of a Hip Exoskeleton
Nov 11, 2020
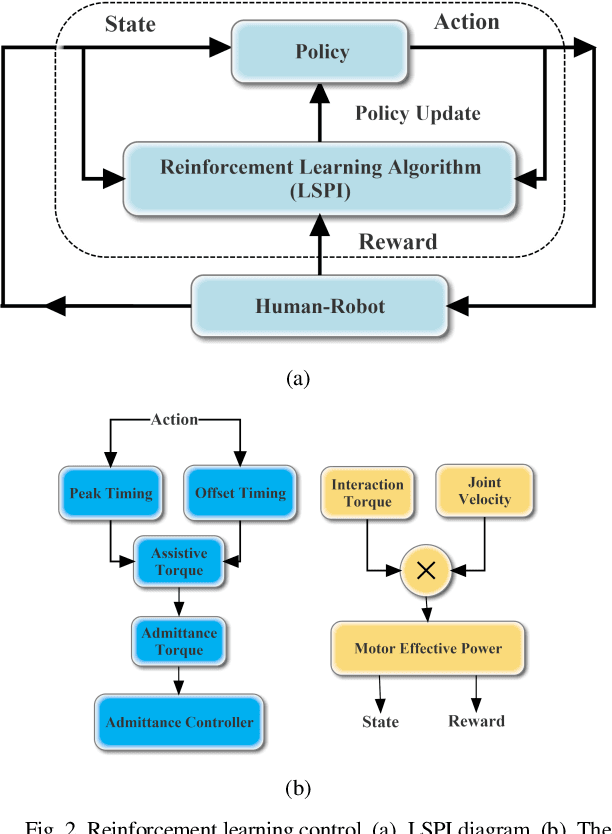
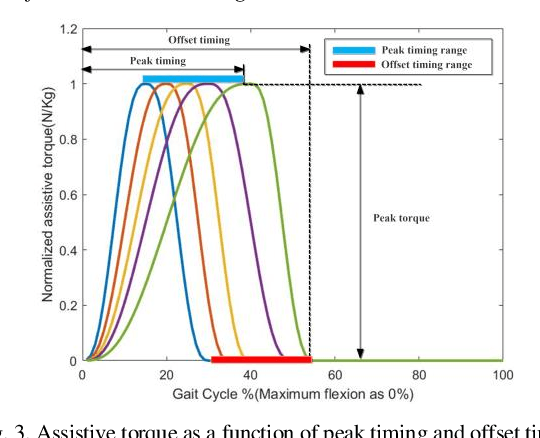
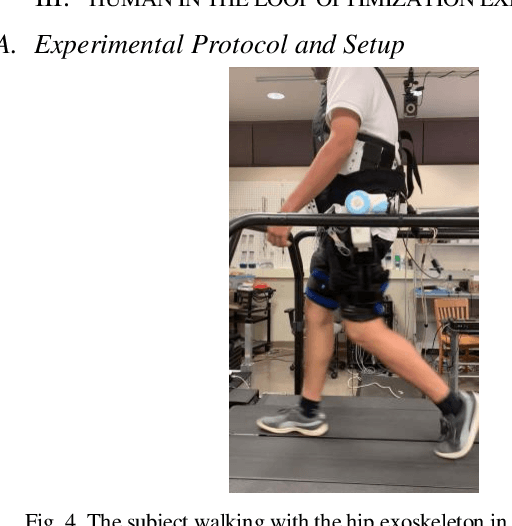
Robotic exoskeletons are exciting technologies for augmenting human mobility. However, designing such a device for seamless integration with the human user and to assist human movement still is a major challenge. This paper aims at developing a novel data-driven solution framework based on reinforcement learning (RL), without first modeling the human-robot dynamics, to provide optimal and adaptive personalized torque assistance for reducing human efforts during walking. Our automatic personalization solution framework includes the assistive torque profile with two control timing parameters (peak and offset timings), the least square policy iteration (LSPI) for learning the parameter tuning policy, and a cost function based on transferred work ratio. The proposed controller was successfully validated on a healthy human subject to assist unilateral hip extension in walking. The results showed that the optimal and adaptive RL controller as a new approach was feasible for tuning assistive torque profile of the hip exoskeleton that coordinated with human actions and reduced activation level of hip extensor muscle in human.