 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-step Temporal Modeling for UAV Tracking
Mar 07, 2024In the realm of unmanned aerial vehicle (UAV) tracking, Siamese-based approaches have gained traction due to their optimal balance between efficiency and precision. However, UAV scenarios often present challenges such as insufficient sampling resolution, fast motion and small objects with limited feature information. As a result, temporal context in UAV tracking tasks plays a pivotal role in target location, overshadowing the target's precise features. In this paper, we introduce MT-Track, a streamlined and efficient multi-step temporal modeling framework designed to harness the temporal context from historical frames for enhanced UAV tracking. This temporal integration occurs in two steps: correlation map generation and correlation map refinement. Specifically, we unveil a unique temporal correlation module that dynamically assesses the interplay between the template and search region features. This module leverages temporal information to refresh the template feature, yielding a more precise correlation map. Subsequently, we propose a mutual transformer module to refine the correlation maps of historical and current frames by modeling the temporal knowledge in the tracking sequence. This method significantly trims computational demands compared to the raw transformer. The compact yet potent nature of our tracking framework ensures commendable tracking outcomes, particularly in extended tracking scenarios.
BACTrack: Building Appearance Collection for Aerial Tracking
Dec 11, 2023
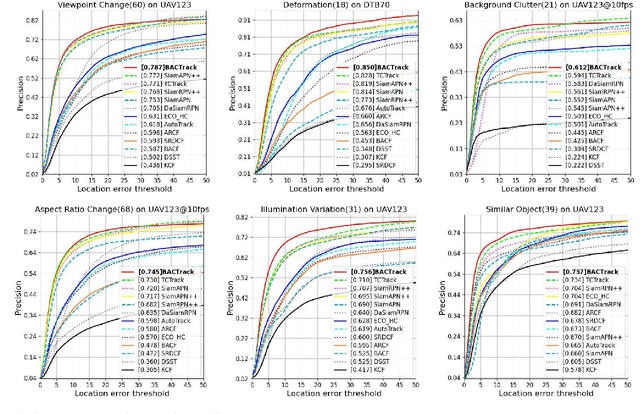
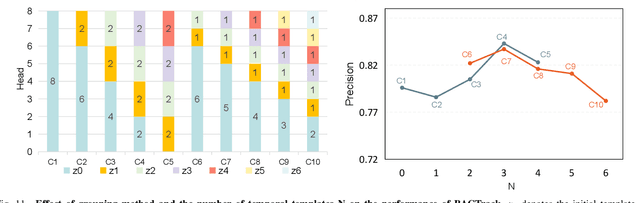
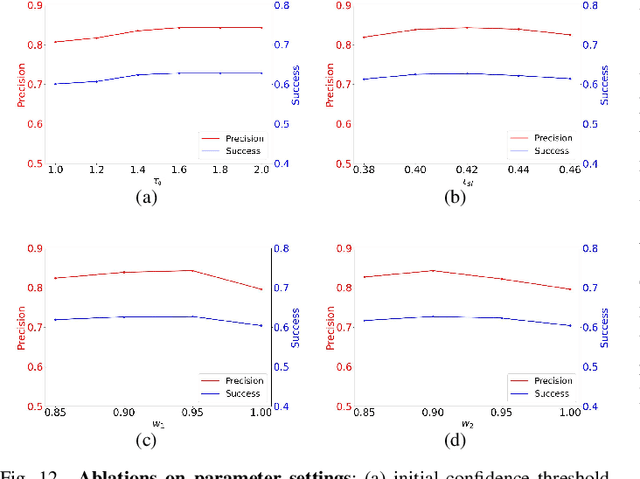
Siamese network-based trackers have shown remarkable success in aerial tracking. Most previous works, however, usually perform template matching only between the initial template and the search region and thus fail to deal with rapidly changing targets that often appear in aerial tracking. As a remedy, this work presents Building Appearance Collection Tracking (BACTrack). This simple yet effective tracking framework builds a dynamic collection of target templates online and performs efficient multi-template matching to achieve robust tracking. Specifically, BACTrack mainly comprises a Mixed-Temporal Transformer (MTT) and an appearance discriminator. The former is responsible for efficiently building relationships between the search region and multiple target templates in parallel through a mixed-temporal attention mechanism. At the same time, the appearance discriminator employs an online adaptive template-update strategy to ensure that the collected multiple templates remain reliable and diverse, allowing them to closely follow rapid changes in the target's appearance and suppress background interference during tracking. Extensive experiments show that our BACTrack achieves top performance on four challenging aerial tracking benchmarks while maintaining an impressive speed of over 87 FPS on a single GPU. Speed tests on embedded platforms also validate our potential suitability for deployment on UAV platforms.