 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePoint-to-Mask: From Arbitrary Point Annotations to Mask-Level Infrared Small Target Detection
Mar 17, 2026Infrared small target detection (IRSTD) methods predominantly formulate the task as pixel-level segmentation, which requires costly dense annotations and is not well suited to tiny targets with weak texture and ambiguous boundaries. To address this issue, we propose Point-to-Mask, a framework that bridges low-cost point supervision and mask-level detection through two components: a Physics-driven Adaptive Mask Generation (PAMG) module that converts point annotations into compact target masks and geometric cues, and a lightweight Radius-aware Point Regression Network (RPR-Net) that reformulates IRSTD as target center localization and effective radius regression using spatiotemporal motion cues. The two modules form a closed loop: PAMG generates pseudo masks and geometric supervision during training, while the geometric predictions of RPR-Net are fed back to PAMG for pixel-level mask recovery during inference. To facilitate systematic evaluation, we further construct SIRSTD-Pixel, a sequential dataset with refined pixel-level annotations. Experiments show that the proposed framework achieves strong pseudo-label quality, high detection accuracy, and efficient inference, approaching full-supervision performance under point-supervised settings with substantially lower annotation cost. Code and datasets will be available at: https://github.com/GaoScience/point-to-mask.
Temporal Point-Supervised Signal Reconstruction: A Human-Annotation-Free Framework for Weak Moving Target Detection
Jul 23, 2025In low-altitude surveillance and early warning systems, detecting weak moving targets remains a significant challenge due to low signal energy, small spatial extent, and complex background clutter. Existing methods struggle with extracting robust features and suffer from the lack of reliable annotations. To address these limitations, we propose a novel Temporal Point-Supervised (TPS) framework that enables high-performance detection of weak targets without any manual annotations.Instead of conventional frame-based detection, our framework reformulates the task as a pixel-wise temporal signal modeling problem, where weak targets manifest as short-duration pulse-like responses. A Temporal Signal Reconstruction Network (TSRNet) is developed under the TPS paradigm to reconstruct these transient signals.TSRNet adopts an encoder-decoder architecture and integrates a Dynamic Multi-Scale Attention (DMSAttention) module to enhance its sensitivity to diverse temporal patterns. Additionally, a graph-based trajectory mining strategy is employed to suppress false alarms and ensure temporal consistency.Extensive experiments on a purpose-built low-SNR dataset demonstrate that our framework outperforms state-of-the-art methods while requiring no human annotations. It achieves strong detection performance and operates at over 1000 FPS, underscoring its potential for real-time deployment in practical scenarios.
Dim Small Target Detection and Tracking: A Novel Method Based on Temporal Energy Selective Scaling and Trajectory Association
May 15, 2024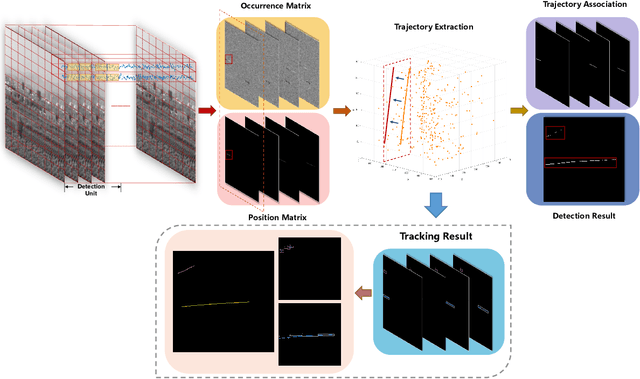
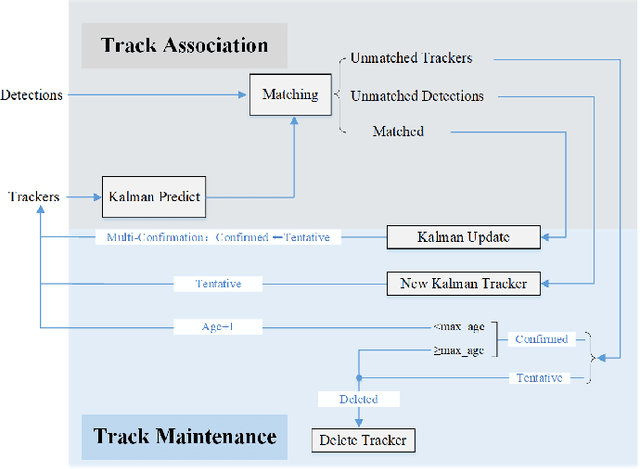
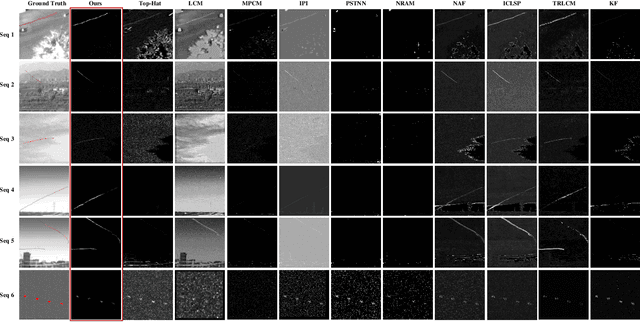
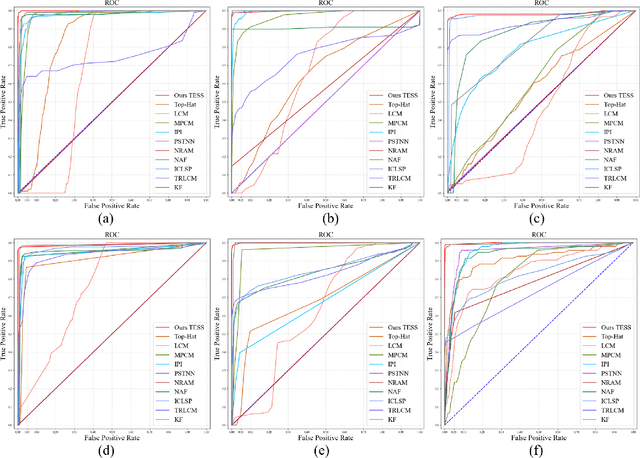
The detection and tracking of small targets in passive optical remote sensing (PORS) has broad applications. However, most of the previously proposed methods seldom utilize the abundant temporal features formed by target motion, resulting in poor detection and tracking performance for low signal-to-clutter ratio (SCR) targets. In this article, we analyze the difficulty based on spatial features and the feasibility based on temporal features of realizing effective detection. According to this analysis, we use a multi-frame as a detection unit and propose a detection method based on temporal energy selective scaling (TESS). Specifically, we investigated the composition of intensity temporal profiles (ITPs) formed by pixels on a multi-frame detection unit. For the target-present pixel, the target passing through the pixel will bring a weak transient disturbance on the ITP and introduce a change in the statistical properties of ITP. We use a well-designed function to amplify the transient disturbance, suppress the background and noise components, and output the trajectory of the target on the multi-frame detection unit. Subsequently, to solve the contradiction between the detection rate and the false alarm rate brought by the traditional threshold segmentation, we associate the temporal and spatial features of the output trajectory and propose a trajectory extraction method based on the 3D Hough transform. Finally, we model the trajectory of the target and propose a trajectory-based multi-target tracking method. Compared with the various state-of-the-art detection and tracking methods, experiments in multiple scenarios prove the superiority of our proposed methods.
MSTFormer: Motion Inspired Spatial-temporal Transformer with Dynamic-aware Attention for long-term Vessel Trajectory Prediction
Mar 21, 2023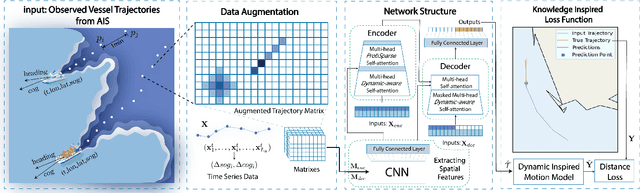

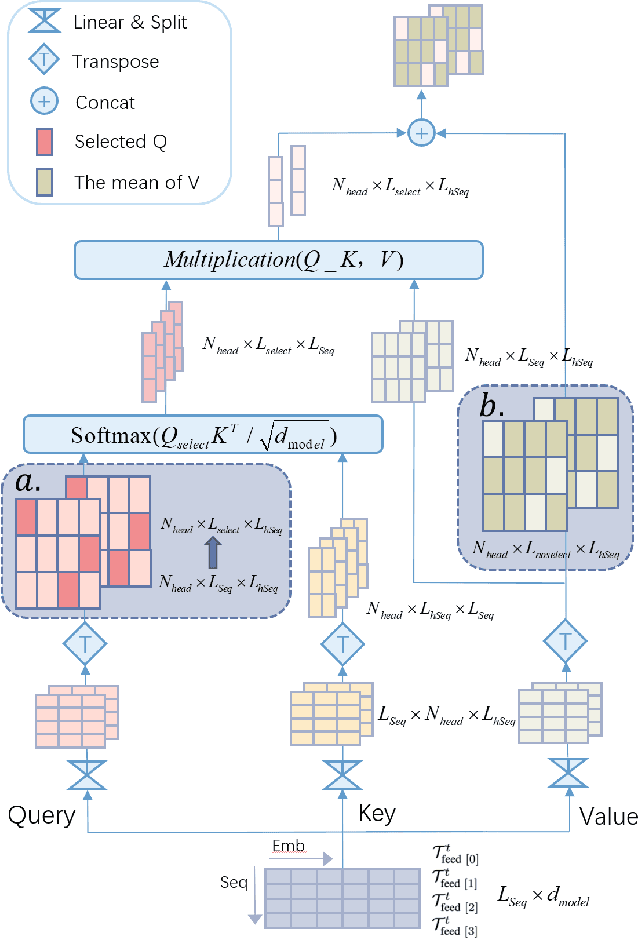
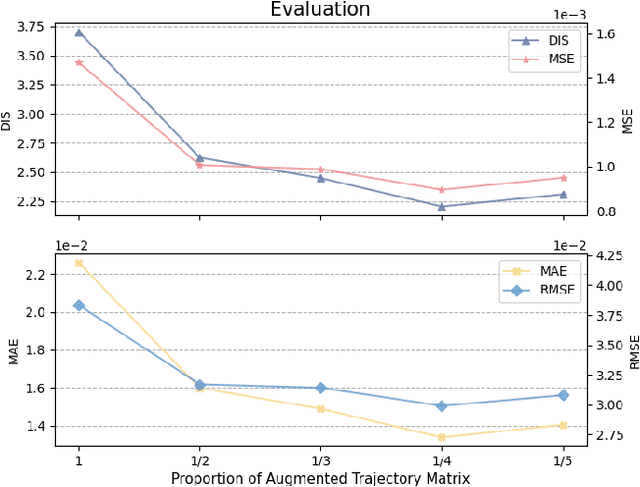
Incorporating the dynamics knowledge into the model is critical for achieving accurate trajectory prediction while considering the spatial and temporal characteristics of the vessel. However, existing methods rarely consider the underlying dynamics knowledge and directly use machine learning algorithms to predict the trajectories. Intuitively, the vessel's motions are following the laws of dynamics, e.g., the speed of a vessel decreases when turning a corner. Yet, it is challenging to combine dynamic knowledge and neural networks due to their inherent heterogeneity. Against this background, we propose MSTFormer, a motion inspired vessel trajectory prediction method based on Transformer. The contribution of this work is threefold. First, we design a data augmentation method to describe the spatial features and motion features of the trajectory. Second, we propose a Multi-headed Dynamic-aware Self-attention mechanism to focus on trajectory points with frequent motion transformations. Finally, we construct a knowledge-inspired loss function to further boost the performance of the model. Experimental results on real-world datasets show that our strategy not only effectively improves long-term predictive capability but also outperforms backbones on cornering data.The ablation analysis further confirms the efficacy of the proposed method. To the best of our knowledge, MSTFormer is the first neural network model for trajectory prediction fused with vessel motion dynamics, providing a worthwhile direction for future research.The source code is available at https://github.com/simple316/MSTFormer.