 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomating the Training and Deployment of Models in MLOps by Integrating Systems with Machine Learning
May 16, 2024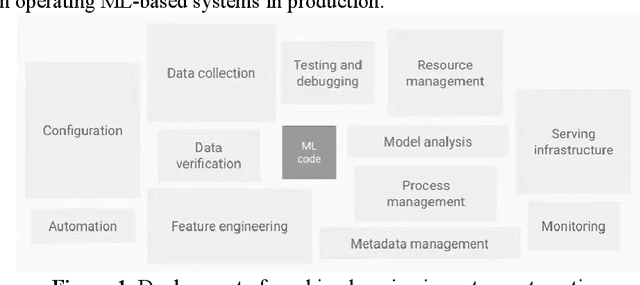
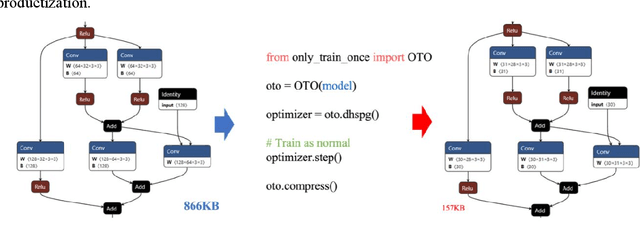
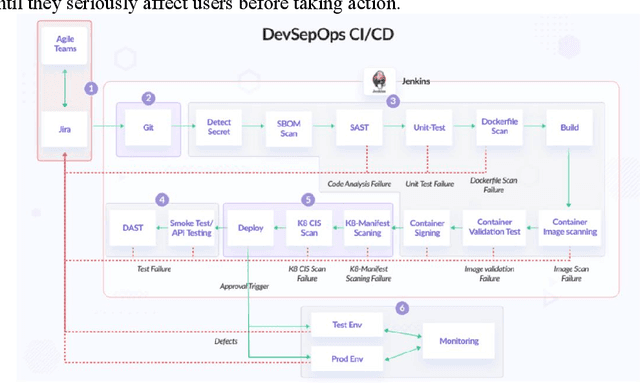
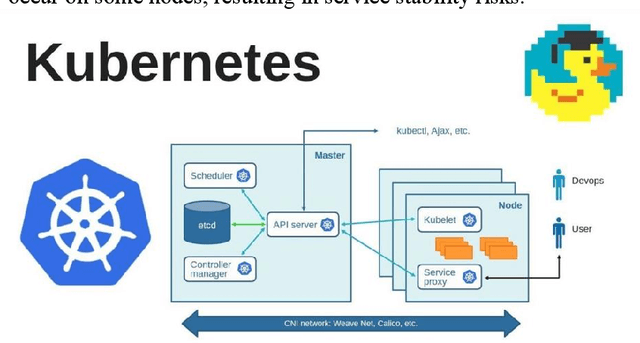
This article introduces the importance of machine learning in real-world applications and explores the rise of MLOps (Machine Learning Operations) and its importance for solving challenges such as model deployment and performance monitoring. By reviewing the evolution of MLOps and its relationship to traditional software development methods, the paper proposes ways to integrate the system into machine learning to solve the problems faced by existing MLOps and improve productivity. This paper focuses on the importance of automated model training, and the method to ensure the transparency and repeatability of the training process through version control system. In addition, the challenges of integrating machine learning components into traditional CI/CD pipelines are discussed, and solutions such as versioning environments and containerization are proposed. Finally, the paper emphasizes the importance of continuous monitoring and feedback loops after model deployment to maintain model performance and reliability. Using case studies and best practices from Netflix, the article presents key strategies and lessons learned for successful implementation of MLOps practices, providing valuable references for other organizations to build and optimize their own MLOps practices.
Enhancing 3D Object Detection by Using Neural Network with Self-adaptive Thresholding
May 13, 2024


Robust 3D object detection remains a pivotal concern in the domain of autonomous field robotics. Despite notable enhancements in detection accuracy across standard datasets, real-world urban environments, characterized by their unstructured and dynamic nature, frequently precipitate an elevated incidence of false positives, thereby undermining the reliability of existing detection paradigms. In this context, our study introduces an advanced post-processing algorithm that modulates detection thresholds dynamically relative to the distance from the ego object. Traditional perception systems typically utilize a uniform threshold, which often leads to decreased efficacy in detecting distant objects. In contrast, our proposed methodology employs a Neural Network with a self-adaptive thresholding mechanism that significantly attenuates false negatives while concurrently diminishing false positives, particularly in complex urban settings. Empirical results substantiate that our algorithm not only augments the performance of 3D object detection models in diverse urban and adverse weather scenarios but also establishes a new benchmark for adaptive thresholding techniques in field robotics.