 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePhysics-Learning AI Datamodel (PLAID) datasets: a collection of physics simulations for machine learning
May 08, 2025Machine learning-based surrogate models have emerged as a powerful tool to accelerate simulation-driven scientific workflows. However, their widespread adoption is hindered by the lack of large-scale, diverse, and standardized datasets tailored to physics-based simulations. While existing initiatives provide valuable contributions, many are limited in scope-focusing on specific physics domains, relying on fragmented tooling, or adhering to overly simplistic datamodels that restrict generalization. To address these limitations, we introduce PLAID (Physics-Learning AI Datamodel), a flexible and extensible framework for representing and sharing datasets of physics simulations. PLAID defines a unified standard for describing simulation data and is accompanied by a library for creating, reading, and manipulating complex datasets across a wide range of physical use cases (gitlab.com/drti/plaid). We release six carefully crafted datasets under the PLAID standard, covering structural mechanics and computational fluid dynamics, and provide baseline benchmarks using representative learning methods. Benchmarking tools are made available on Hugging Face, enabling direct participation by the community and contribution to ongoing evaluation efforts (huggingface.co/PLAIDcompetitions).
MMGP: a Mesh Morphing Gaussian Process-based machine learning method for regression of physical problems under non-parameterized geometrical variability
May 22, 2023



When learning simulations for modeling physical phenomena in industrial designs, geometrical variabilities are of prime interest. For parameterized geometries, classical regression techniques can be successfully employed. However, in practice, the shape parametrization is generally not available in the inference stage and we only have access to a mesh discretization. Learning mesh-based simulations is challenging and most of the recent advances have been relying on deep graph neural networks in order to overcome the limitations of standard machine learning approaches. While graph neural networks have shown promising performances, they still suffer from a few shortcomings, such as the need of large datasets or their inability to provide predictive uncertainties out of the shelf. In this work, we propose a machine learning method that do not rely on graph neural networks. Complex geometrical shapes and variations with fixed topology are dealt with using well-known mesh morphing onto a common support, combined with classical dimensionality reduction techniques and Gaussian processes. The proposed methodology can easily deal with large meshes, without knowing any parametrization describing the shape, and provide predictive uncertainties, which are of primary importance for decision-making. In the considered numerical experiments, the proposed method is competitive with respect to our implementation of graph neural networks, regarding either efficiency of the training and accuracy of the predictions.
Paris-Lille-3D: a large and high-quality ground truth urban point cloud dataset for automatic segmentation and classification
Apr 10, 2018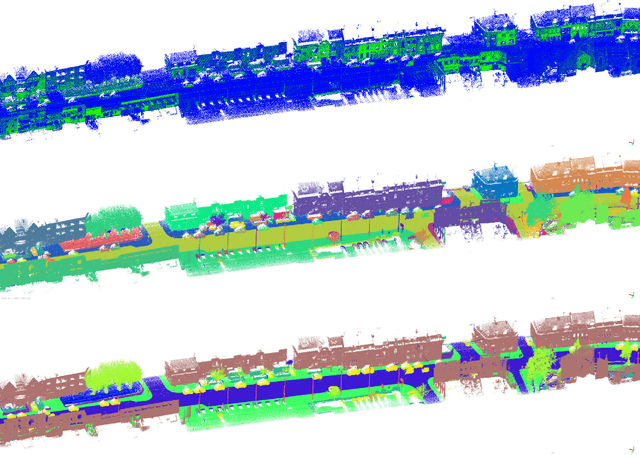
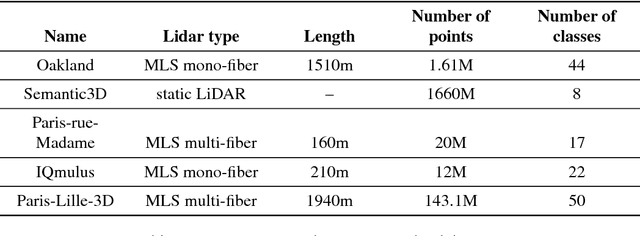
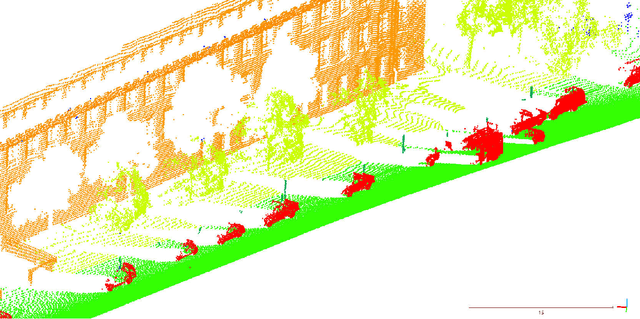

This paper introduces a new Urban Point Cloud Dataset for Automatic Segmentation and Classification acquired by Mobile Laser Scanning (MLS). We describe how the dataset is obtained from acquisition to post-processing and labeling. This dataset can be used to learn classification algorithm, however, given that a great attention has been paid to the split between the different objects, this dataset can also be used to learn the segmentation. The dataset consists of around 2km of MLS point cloud acquired in two cities. The number of points and range of classes make us consider that it can be used to train Deep-Learning methods. Besides we show some results of automatic segmentation and classification. The dataset is available at: http://caor-mines-paristech.fr/fr/paris-lille-3d-dataset/
Classification of Point Cloud Scenes with Multiscale Voxel Deep Network
Apr 10, 2018



In this article we describe a new convolutional neural network (CNN) to classify 3D point clouds of urban or indoor scenes. Solutions are given to the problems encountered working on scene point clouds, and a network is described that allows for point classification using only the position of points in a multi-scale neighborhood. On the reduced-8 Semantic3D benchmark [Hackel et al., 2017], this network, ranked second, beats the state of the art of point classification methods (those not using a regularization step).