 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModeling Stereo-Confidence Out of the End-to-End Stereo-Matching Network via Disparity Plane Sweep
Jan 23, 2024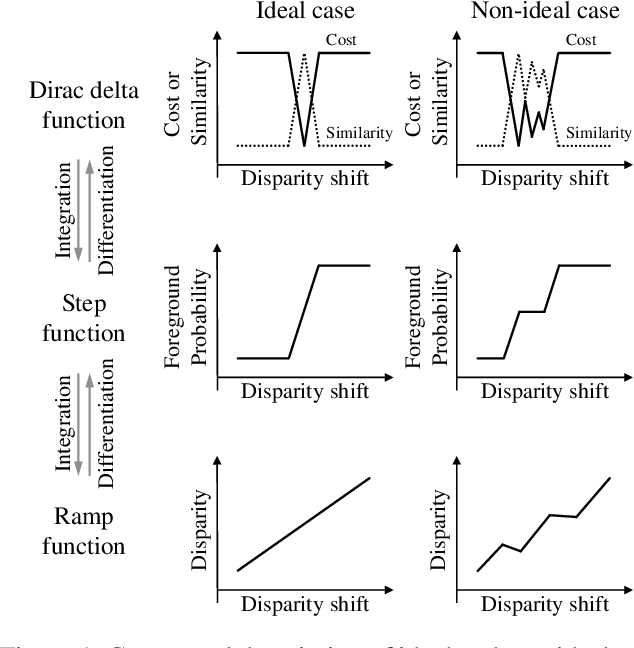
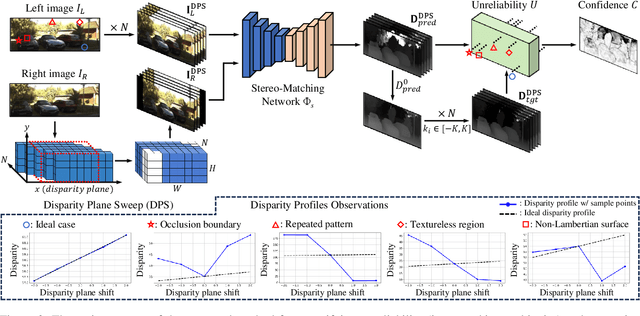
We propose a novel stereo-confidence that can be measured externally to various stereo-matching networks, offering an alternative input modality choice of the cost volume for learning-based approaches, especially in safety-critical systems. Grounded in the foundational concepts of disparity definition and the disparity plane sweep, the proposed stereo-confidence method is built upon the idea that any shift in a stereo-image pair should be updated in a corresponding amount shift in the disparity map. Based on this idea, the proposed stereo-confidence method can be summarized in three folds. 1) Using the disparity plane sweep, multiple disparity maps can be obtained and treated as a 3-D volume (predicted disparity volume), like the cost volume is constructed. 2) One of these disparity maps serves as an anchor, allowing us to define a desirable (or ideal) disparity profile at every spatial point. 3) By comparing the desirable and predicted disparity profiles, we can quantify the level of matching ambiguity between left and right images for confidence measurement. Extensive experimental results using various stereo-matching networks and datasets demonstrate that the proposed stereo-confidence method not only shows competitive performance on its own but also consistent performance improvements when it is used as an input modality for learning-based stereo-confidence methods.
Stereo-Matching Knowledge Distilled Monocular Depth Estimation Filtered by Multiple Disparity Consistency
Jan 23, 2024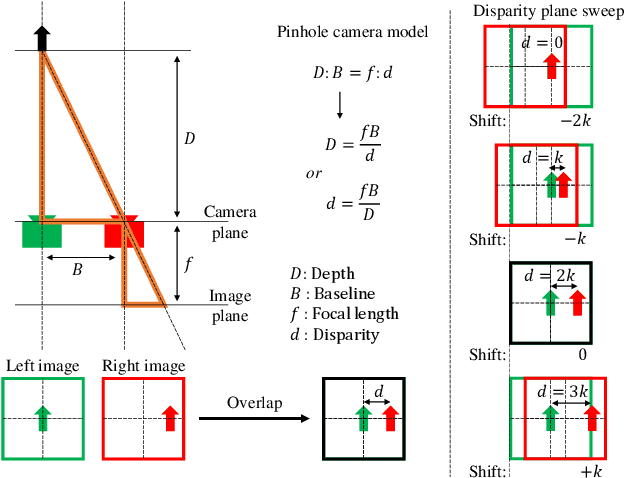
In stereo-matching knowledge distillation methods of the self-supervised monocular depth estimation, the stereo-matching network's knowledge is distilled into a monocular depth network through pseudo-depth maps. In these methods, the learning-based stereo-confidence network is generally utilized to identify errors in the pseudo-depth maps to prevent transferring the errors. However, the learning-based stereo-confidence networks should be trained with ground truth (GT), which is not feasible in a self-supervised setting. In this paper, we propose a method to identify and filter errors in the pseudo-depth map using multiple disparity maps by checking their consistency without the need for GT and a training process. Experimental results show that the proposed method outperforms the previous methods and works well on various configurations by filtering out erroneous areas where the stereo-matching is vulnerable, especially such as textureless regions, occlusion boundaries, and reflective surfaces.