 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStereo-Matching Knowledge Distilled Monocular Depth Estimation Filtered by Multiple Disparity Consistency
Paper and Code
Jan 23, 2024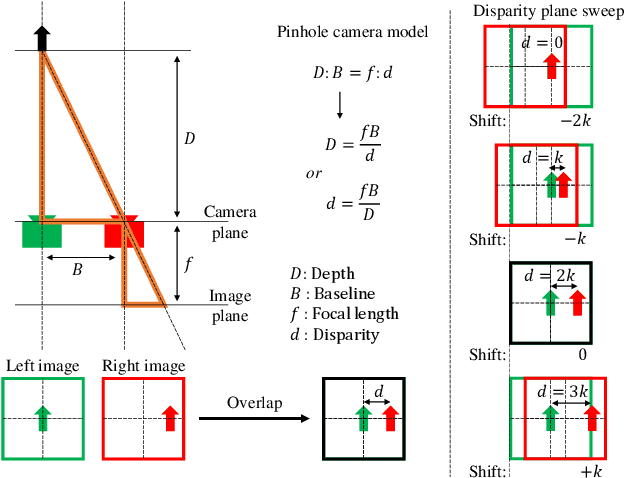
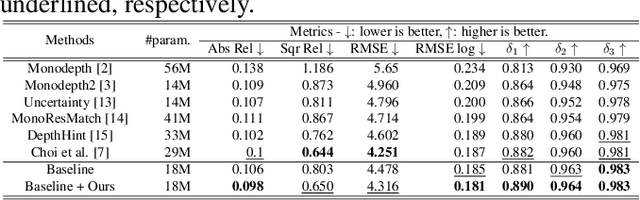
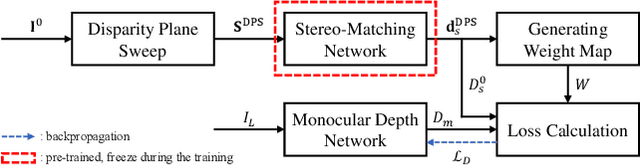
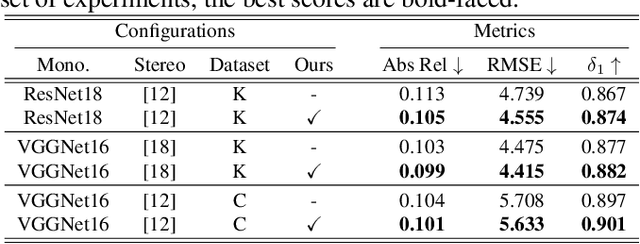
In stereo-matching knowledge distillation methods of the self-supervised monocular depth estimation, the stereo-matching network's knowledge is distilled into a monocular depth network through pseudo-depth maps. In these methods, the learning-based stereo-confidence network is generally utilized to identify errors in the pseudo-depth maps to prevent transferring the errors. However, the learning-based stereo-confidence networks should be trained with ground truth (GT), which is not feasible in a self-supervised setting. In this paper, we propose a method to identify and filter errors in the pseudo-depth map using multiple disparity maps by checking their consistency without the need for GT and a training process. Experimental results show that the proposed method outperforms the previous methods and works well on various configurations by filtering out erroneous areas where the stereo-matching is vulnerable, especially such as textureless regions, occlusion boundaries, and reflective surfaces.