 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConnectivity-Aware Representations for Constrained Motion Planning via Multi-Scale Contrastive Learning
Mar 26, 2026The objective of constrained motion planning is to connect start and goal configurations while satisfying task-specific constraints. Motion planning becomes inefficient or infeasible when the configurations lie in disconnected regions, known as essentially mutually disconnected (EMD) components. Constraints further restrict feasible space to a lower-dimensional submanifold, while redundancy introduces additional complexity because a single end-effector pose admits infinitely many inverse kinematic solutions that may form discrete self-motion manifolds. This paper addresses these challenges by learning a connectivity-aware representation for selecting start and goal configurations prior to planning. Joint configurations are embedded into a latent space through multi-scale manifold learning across neighborhood ranges from local to global, and clustering generates pseudo-labels that supervise a contrastive learning framework. The proposed framework provides a connectivity-aware measure that biases the selection of start and goal configurations in connected regions, avoiding EMDs and yielding higher success rates with reduced planning time. Experiments on various manipulation tasks showed that our method achieves 1.9 times higher success rates and reduces the planning time by a factor of 0.43 compared to baselines.
TOLEBI: Learning Fault-Tolerant Bipedal Locomotion via Online Status Estimation and Fallibility Rewards
Feb 05, 2026With the growing employment of learning algorithms in robotic applications, research on reinforcement learning for bipedal locomotion has become a central topic for humanoid robotics. While recently published contributions achieve high success rates in locomotion tasks, scarce attention has been devoted to the development of methods that enable to handle hardware faults that may occur during the locomotion process. However, in real-world settings, environmental disturbances or sudden occurrences of hardware faults might yield severe consequences. To address these issues, this paper presents TOLEBI (A faulT-tOlerant Learning framEwork for Bipedal locomotIon) that handles faults on the robot during operation. Specifically, joint locking, power loss and external disturbances are injected in simulation to learn fault-tolerant locomotion strategies. In addition to transferring the learned policy to the real robot via sim-to-real transfer, an online joint status module incorporated. This module enables to classify joint conditions by referring to the actual observations at runtime under real-world conditions. The validation experiments conducted both in real-world and simulation with the humanoid robot TOCABI highlight the applicability of the proposed approach. To our knowledge, this manuscript provides the first learning-based fault-tolerant framework for bipedal locomotion, thereby fostering the development of efficient learning methods in this field.
SUPER -- A Framework for Sensitivity-based Uncertainty-aware Performance and Risk Assessment in Visual Inertial Odometry
Dec 16, 2025While many visual odometry (VO), visual-inertial odometry (VIO), and SLAM systems achieve high accuracy, the majority of existing methods miss to assess risks at runtime. This paper presents SUPER (Sensitivity-based Uncertainty-aware PErformance and Risk assessment) that is a generic and explainable framework that propagates uncertainties via sensitivities for real-time risk assessment in VIO. The scientific novelty lies in the derivation of a real-time risk indicator that is backend-agnostic and exploits the Schur complement blocks of the Gauss-Newton normal matrix to propagate uncertainties. Practically, the Schur complement captures the sensitivity that reflects the influence of the uncertainty on the risk occurrence. Our framework estimates risks on the basis of the residual magnitudes, geometric conditioning, and short horizon temporal trends without requiring ground truth knowledge. Our framework enables to reliably predict trajectory degradation 50 frames ahead with an improvement of 20% to the baseline. In addition, SUPER initiates a stop or relocalization policy with 89.1% recall. The framework is backend agnostic and operates in real time with less than 0.2% additional CPU cost. Experiments show that SUPER provides consistent uncertainty estimates. A SLAM evaluation highlights the applicability to long horizon mapping.
Uncertainty-aware Risk Assessment of Robotic Systems via Importance Sampling
Aug 27, 2023



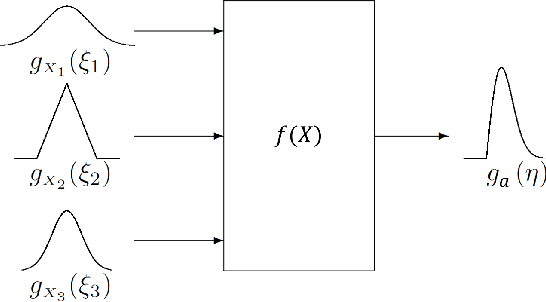
In this paper, we introduce a probabilistic approach to risk assessment of robot systems by focusing on the impact of uncertainties. While various approaches to identifying systematic hazards (e.g., bugs, design flaws, etc.) can be found in current literature, little attention has been devoted to evaluating risks in robot systems in a probabilistic manner. Existing methods rely on discrete notions for dangerous events and assume that the consequences of these can be described by simple logical operations. In this work, we consider measurement uncertainties as one main contributor to the evolvement of risks. Specifically, we study the impact of temporal and spatial uncertainties on the occurrence probability of dangerous failures, thereby deriving an approach for an uncertainty-aware risk assessment. Secondly, we introduce a method to improve the statistical significance of our results: While the rare occurrence of hazardous events makes it challenging to draw conclusions with reliable accuracy, we show that importance sampling -- a technique that successively generates samples in regions with sparse probability densities -- allows for overcoming this issue. We demonstrate the validity of our novel uncertainty-aware risk assessment method in three simulation scenarios from the domain of human-robot collaboration. Finally, we show how the results can be used to evaluate arbitrary safety limits of robot systems.
Safety Evaluation of Robot Systems via Uncertainty Quantification
Feb 21, 2023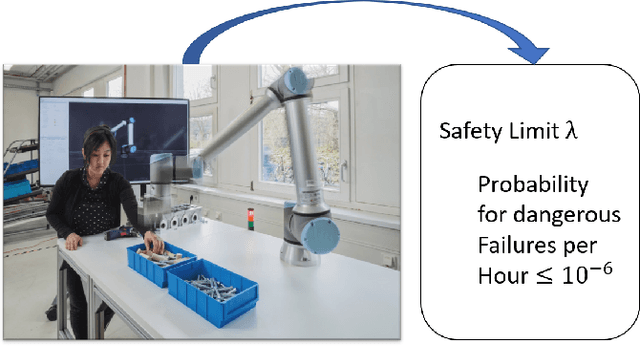


In this paper, we present an approach for quantifying the propagated uncertainty of robot systems in an online and data-driven manner. Especially in Human-Robot Collaboration, keeping track of the safety compliance during run time is essential: Misclassifying dangerous situations as safe might result in severe accidents. According to official regulations (eg, ISO standards), safety in industrial robot applications depends on critical parameters, such as the distance and relative velocity between humans and robots. However, safety can only be assured given a measure for the reliability of these parameters. While different risk detection and mitigation approaches exist in literature, a measure that can be used to evaluate safety limits online, and succinctly implies whether a situation is safe or dangerous, is missing to date. Motivated by this, we introduce a generalizable method for calculating the propagated measurement uncertainty of arbitrary parameters, that captures the accumulated uncertainty originating from sensory devices and environmental disturbances of the system. To show that our approach delivers correct results, we perform validation experiments in simulation. In addition, we employ our method in two real-world settings and demonstrate how quantifying the propagated uncertainty of critical parameters facilitates assessing safety online in Human-Robot Collaboration.