 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBandwidth-Adaptive Spatiotemporal Correspondence Identification for Collaborative Perception
Feb 17, 2025



Correspondence identification (CoID) is an essential capability in multi-robot collaborative perception, which enables a group of robots to consistently refer to the same objects within their respective fields of view. In real-world applications, such as connected autonomous driving, vehicles face challenges in directly sharing raw observations due to limited communication bandwidth. In order to address this challenge, we propose a novel approach for bandwidth-adaptive spatiotemporal CoID in collaborative perception. This approach allows robots to progressively select partial spatiotemporal observations and share with others, while adapting to communication constraints that dynamically change over time. We evaluate our approach across various scenarios in connected autonomous driving simulations. Experimental results validate that our approach enables CoID and adapts to dynamic communication bandwidth changes. In addition, our approach achieves 8%-56% overall improvements in terms of covisible object retrieval for CoID and data sharing efficiency, which outperforms previous techniques and achieves the state-of-the-art performance. More information is available at: https://gaopeng5.github.io/acoid.
Bilevel Learning for Dual-Quadruped Collaborative Transportation under Kinematic and Anisotropic Velocity Constraints
Dec 11, 2024



Multi-robot collaborative transportation is a critical capability that has attracted significant attention over recent years. To reliably transport a kinematically constrained payload, a team of robots must closely collaborate and coordinate their individual velocities to achieve the desired payload motion. For quadruped robots, a key challenge is caused by their anisotropic velocity limits, where forward and backward movement is faster and more stable than lateral motion. In order to enable dual-quadruped collaborative transportation and address the above challenges, we propose a novel Bilevel Learning for Collaborative Transportation (BLCT) approach. In the upper-level, BLCT learns a team collaboration policy for the two quadruped robots to move the payload to the goal position, while accounting for the kinematic constraints imposed by their connection to the payload. In the lower-level, BLCT optimizes velocity controls of each individual robot to closely follow the collaboration policy while satisfying the anisotropic velocity constraints and avoiding obstacles. Experiments demonstrate that our BLCT approach well enables collaborative transportation in challenging scenarios and outperforms baseline approaches.
Multi-Robot Collaborative Navigation with Formation Adaptation
Apr 02, 2024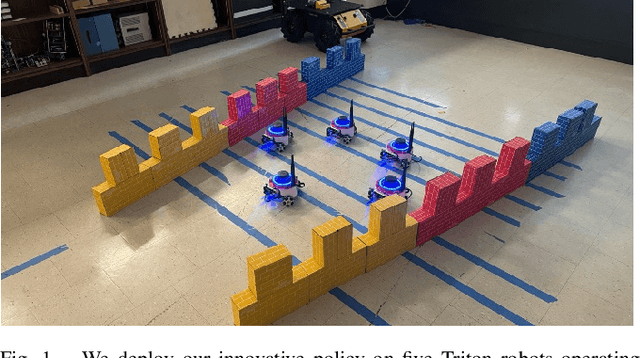

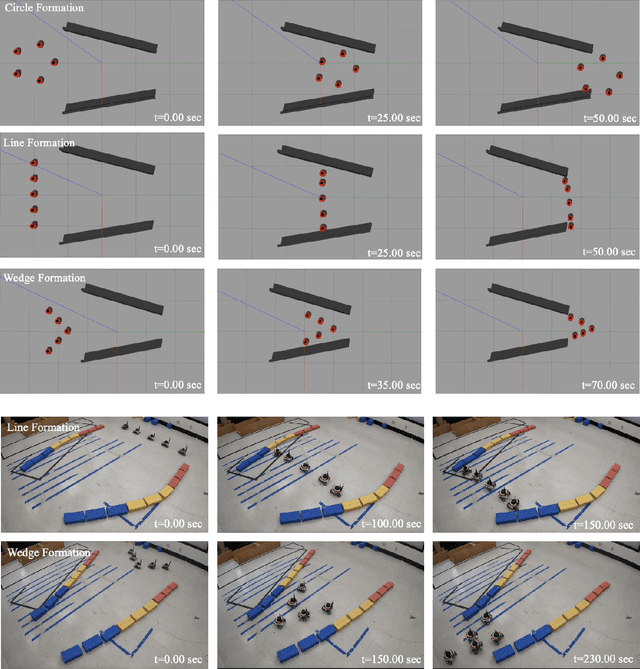
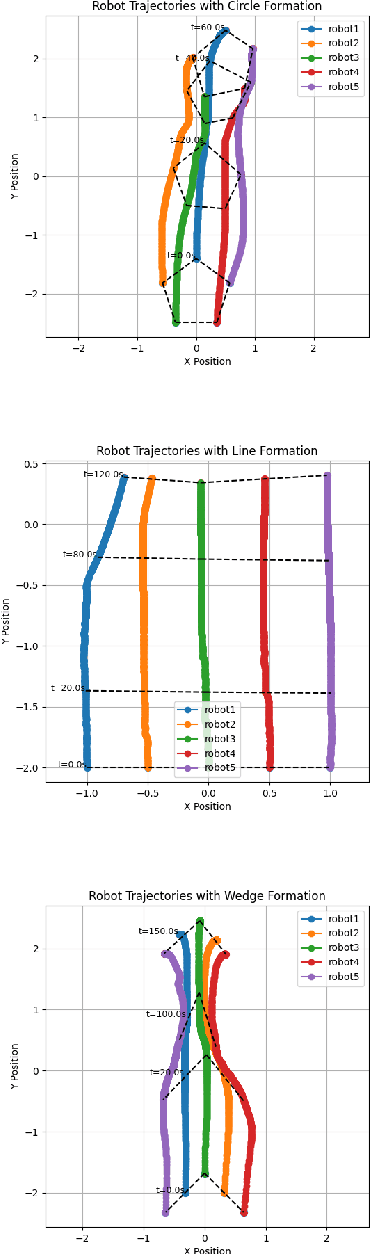
Multi-robot collaborative navigation is an essential ability where teamwork and synchronization are keys. In complex and uncertain environments, adaptive formation is vital, as rigid formations prove to be inadequate. The ability of robots to dynamically adjust their formation enables navigation through unpredictable spaces, maintaining cohesion, and effectively responding to environmental challenges. In this paper, we introduce a novel approach that uses bi-level learning framework. Specifically, we use graph learning at a high level for group coordination and reinforcement learning for individual navigation. We innovate by integrating a spring-damper model within the reinforcement learning reward mechanism, addressing the rigidity of traditional formation control methods. During execution, our approach enables a team of robots to successfully navigate challenging environments, maintain a desired formation shape, and dynamically adjust their formation scale based on environmental information. We conduct extensive experiments to evaluate our approach across three distinct formation scenarios in multi-robot navigation: circle, line, and wedge. Experimental results show that our approach achieves promising results and scalability on multi-robot navigation with formation adaptation.