 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRoboCAP: Robotic Classification and Precision Pouring of Diverse Liquids and Granular Media with Capacitive Sensing
May 13, 2024Liquids and granular media are pervasive throughout human environments, yet remain particularly challenging for robots to sense and manipulate precisely. In this work, we present a systematic approach at integrating capacitive sensing within robotic end effectors to enable robust sensing and precise manipulation of liquids and granular media. We introduce the parallel-jaw RoboCAP Gripper with embedded capacitive sensing arrays that enable a robot to directly sense the materials and dynamics of liquids inside of diverse containers, including some visually opaque. When coupled with model-based control, we demonstrate that the proposed system enables a robotic manipulator to achieve state-of-the-art precision pouring accuracy for a range of substances with varying dynamics properties. Code, designs, and build details are available on the project website.
SLURP! Spectroscopy of Liquids Using Robot Pre-Touch Sensing
Oct 10, 2022
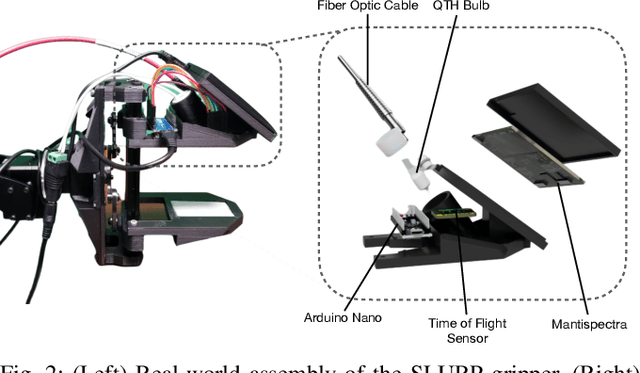

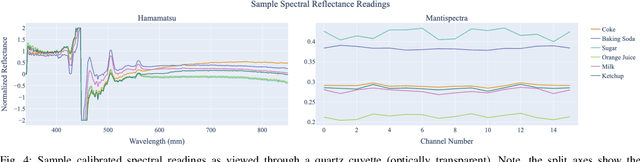
Liquids and granular media are pervasive throughout human environments. Their free-flowing nature causes people to constrain them into containers. We do so with thousands of different types of containers made out of different materials with varying sizes, shapes, and colors. In this work, we present a state-of-the-art sensing technique for robots to perceive what liquid is inside of an unknown container. We do so by integrating Visible to Near Infrared (VNIR) reflectance spectroscopy into a robot's end effector. We introduce a hierarchical model for inferring the material classes of both containers and internal contents given spectral measurements from two integrated spectrometers. To train these inference models, we capture and open source a dataset of spectral measurements from over 180 different combinations of containers and liquids. Our technique demonstrates over 85% accuracy in identifying 13 different liquids and granular media contained within 13 different containers. The sensitivity of our spectral readings allow our model to also identify the material composition of the containers themselves with 96% accuracy. Overall, VNIR spectroscopy presents a promising method to give household robots a general-purpose ability to infer the liquids inside of containers, without needing to open or manipulate the containers.