 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOverhead Line Defect Recognition Based on Unsupervised Semantic Segmentation
Nov 02, 2023Overhead line inspection greatly benefits from defect recognition using visible light imagery. Addressing the limitations of existing feature extraction techniques and the heavy data dependency of deep learning approaches, this paper introduces a novel defect recognition framework. This is built on the Faster RCNN network and complemented by unsupervised semantic segmentation. The approach involves identifying the type and location of the target equipment, utilizing semantic segmentation to differentiate between the device and its backdrop, and finally employing similarity measures and logical rules to categorize the type of defect. Experimental results indicate that this methodology focuses more on the equipment rather than the defects when identifying issues in overhead lines. This leads to a notable enhancement in accuracy and exhibits impressive adaptability. Thus, offering a fresh perspective for automating the inspection of distribution network equipment.
Tree-GPT: Modular Large Language Model Expert System for Forest Remote Sensing Image Understanding and Interactive Analysis
Oct 07, 2023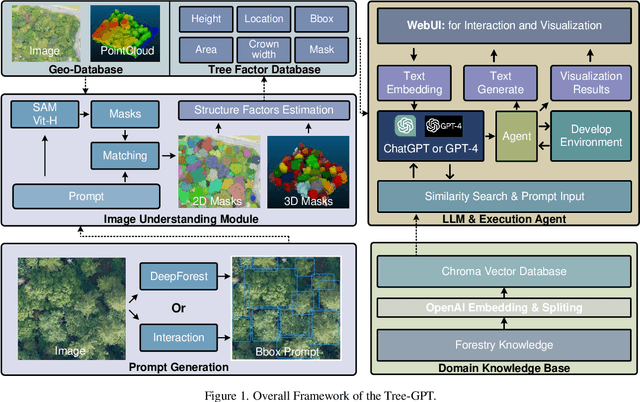
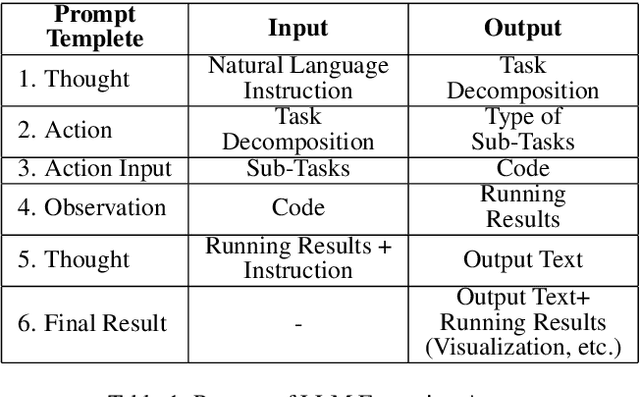
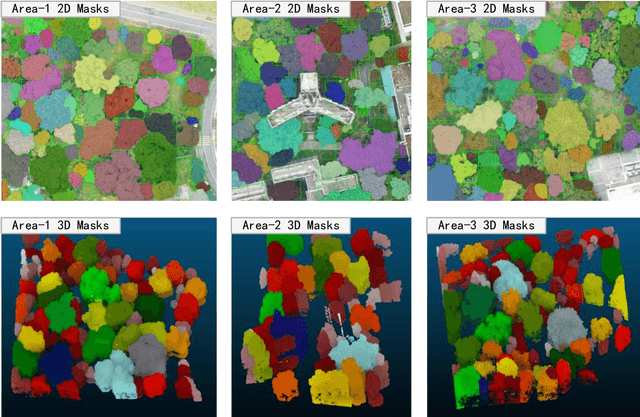
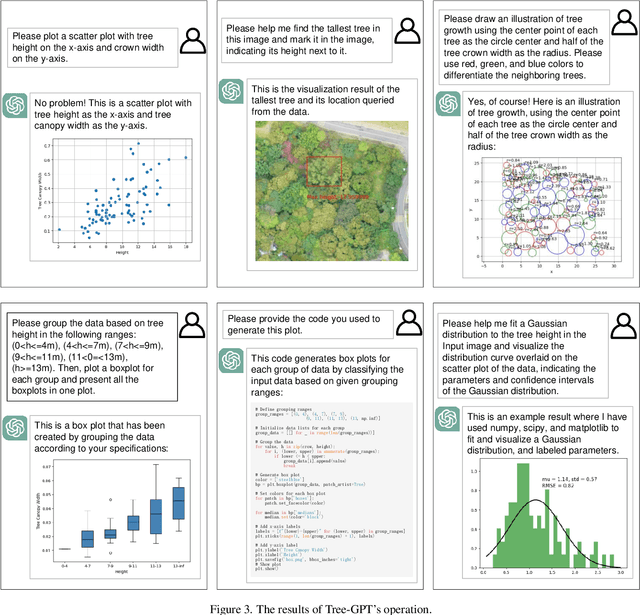
This paper introduces a novel framework, Tree-GPT, which incorporates Large Language Models (LLMs) into the forestry remote sensing data workflow, thereby enhancing the efficiency of data analysis. Currently, LLMs are unable to extract or comprehend information from images and may generate inaccurate text due to a lack of domain knowledge, limiting their use in forestry data analysis. To address this issue, we propose a modular LLM expert system, Tree-GPT, that integrates image understanding modules, domain knowledge bases, and toolchains. This empowers LLMs with the ability to comprehend images, acquire accurate knowledge, generate code, and perform data analysis in a local environment. Specifically, the image understanding module extracts structured information from forest remote sensing images by utilizing automatic or interactive generation of prompts to guide the Segment Anything Model (SAM) in generating and selecting optimal tree segmentation results. The system then calculates tree structural parameters based on these results and stores them in a database. Upon receiving a specific natural language instruction, the LLM generates code based on a thought chain to accomplish the analysis task. The code is then executed by an LLM agent in a local environment and . For ecological parameter calculations, the system retrieves the corresponding knowledge from the knowledge base and inputs it into the LLM to guide the generation of accurate code. We tested this system on several tasks, including Search, Visualization, and Machine Learning Analysis. The prototype system performed well, demonstrating the potential for dynamic usage of LLMs in forestry research and environmental sciences.
AsymFormer: Asymmetrical Cross-Modal Representation Learning for Mobile Platform Real-Time RGB-D Semantic Segmentation
Sep 26, 2023In the realm of robotic intelligence, achieving efficient and precise RGB-D semantic segmentation is a key cornerstone. State-of-the-art multimodal semantic segmentation methods, primarily rooted in symmetrical skeleton networks, find it challenging to harmonize computational efficiency and precision. In this work, we propose AsymFormer, a novel network for real-time RGB-D semantic segmentation, which targets the minimization of superfluous parameters by optimizing the distribution of computational resources and introduces an asymmetrical backbone to allow for the effective fusion of multimodal features. Furthermore, we explore techniques to bolster network accuracy by redefining feature selection and extracting multi-modal self-similarity features without a substantial increase in the parameter count, thereby ensuring real-time execution on robotic platforms. Additionally, a Local Attention-Guided Feature Selection (LAFS) module is used to selectively fuse features from different modalities by leveraging their dependencies. Subsequently, a Cross-Modal Attention-Guided Feature Correlation Embedding (CMA) module is introduced to further extract cross-modal representations. This method is evaluated on NYUv2 and SUNRGBD datasets, with AsymFormer demonstrating competitive results with 52.0% mIoU on NYUv2 and 49.1% mIoU on SUNRGBD. Notably, AsymFormer achieves an inference speed of 65 FPS and after implementing mixed precision quantization, it attains an impressive inference speed of 79 FPS on RTX3090. This significantly outperforms existing multi-modal methods, thereby demonstrating that AsymFormer can strike a balance between high accuracy and efficiency for RGB-D semantic segmentation.