 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRPG: Learning Recursive Point Cloud Generation
May 29, 2021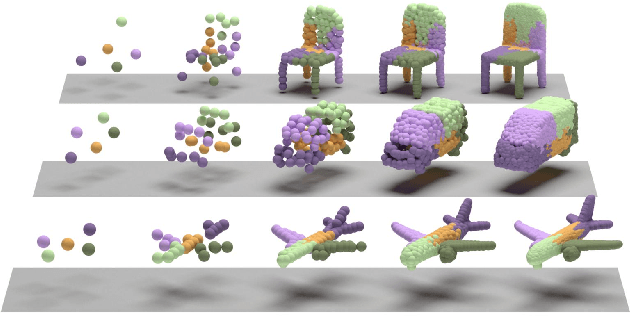

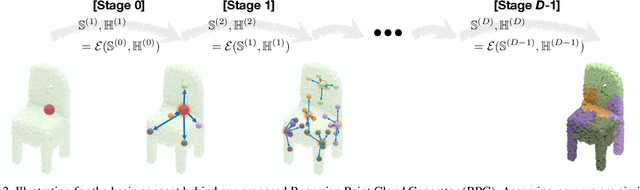
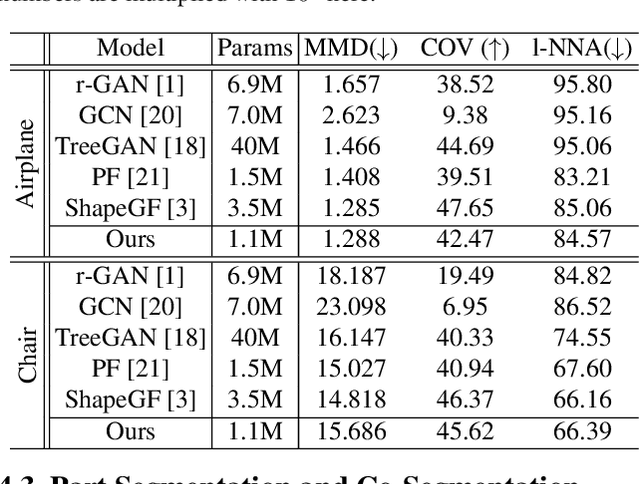
In this paper we propose a novel point cloud generator that is able to reconstruct and generate 3D point clouds composed of semantic parts. Given a latent representation of the target 3D model, the generation starts from a single point and gets expanded recursively to produce the high-resolution point cloud via a sequence of point expansion stages. During the recursive procedure of generation, we not only obtain the coarse-to-fine point clouds for the target 3D model from every expansion stage, but also unsupervisedly discover the semantic segmentation of the target model according to the hierarchical/parent-child relation between the points across expansion stages. Moreover, the expansion modules and other elements used in our recursive generator are mostly sharing weights thus making the overall framework light and efficient. Extensive experiments are conducted to demonstrate that our proposed point cloud generator has comparable or even superior performance on both generation and reconstruction tasks in comparison to various baselines, as well as provides the consistent co-segmentation among 3D instances of the same object class.
Learning Priors for Adversarial Autoencoders
Sep 10, 2019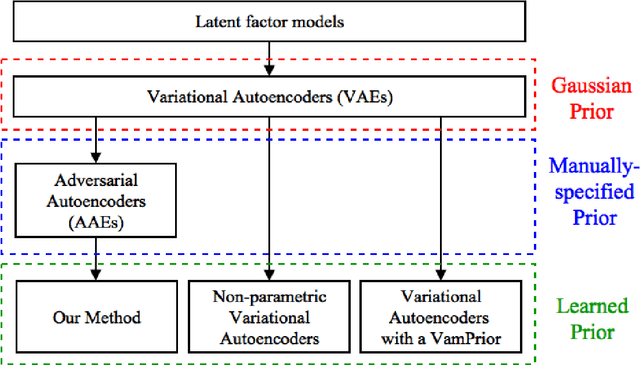
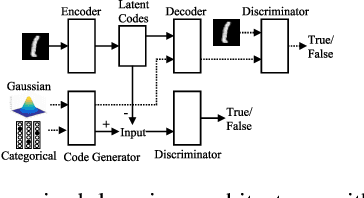
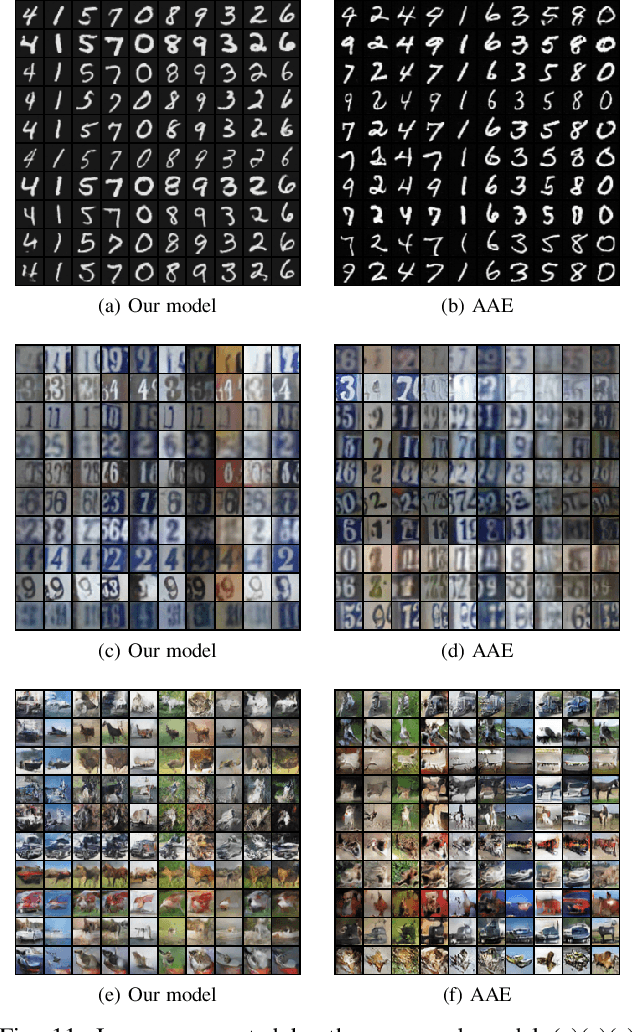
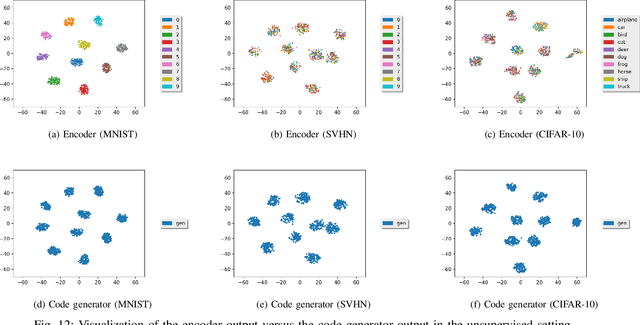
Most deep latent factor models choose simple priors for simplicity, tractability or not knowing what prior to use. Recent studies show that the choice of the prior may have a profound effect on the expressiveness of the model,especially when its generative network has limited capacity. In this paper, we propose to learn a proper prior from data for adversarial autoencoders(AAEs). We introduce the notion of code generators to transform manually selected simple priors into ones that can better characterize the data distribution. Experimental results show that the proposed model can generate better image quality and learn better disentangled representations than AAEs in both supervised and unsupervised settings. Lastly, we present its ability to do cross-domain translation in a text-to-image synthesis task.