Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCroCo: Cross-Modal Contrastive learning for localization of Earth Observation data
Apr 14, 2022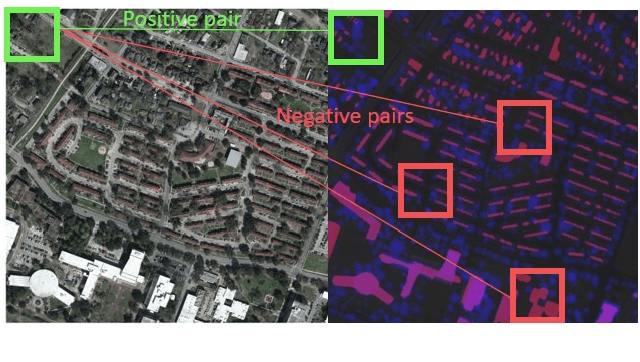

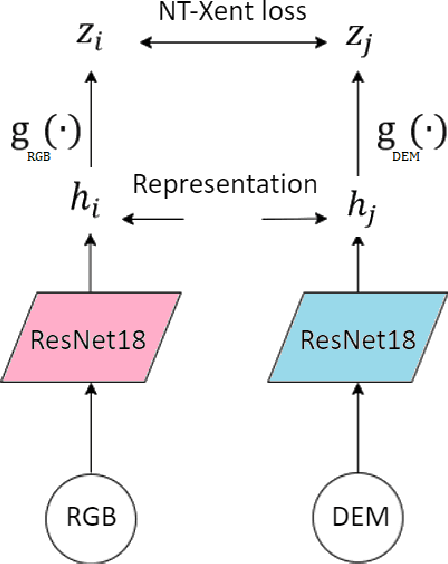
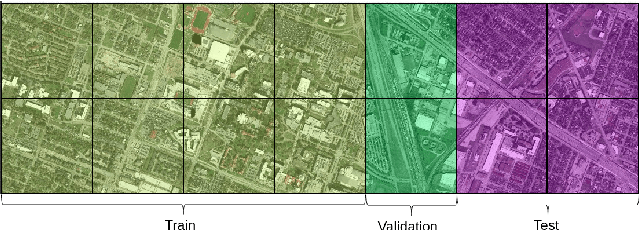
It is of interest to localize a ground-based LiDAR point cloud on remote sensing imagery. In this work, we tackle a subtask of this problem, i.e. to map a digital elevation model (DEM) rasterized from aerial LiDAR point cloud on the aerial imagery. We proposed a contrastive learning-based method that trains on DEM and high-resolution optical imagery and experiment the framework on different data sampling strategies and hyperparameters. In the best scenario, the Top-1 score of 0.71 and Top-5 score of 0.81 are obtained. The proposed method is promising for feature learning from RGB and DEM for localization and is potentially applicable to other data sources too. Source code will be released at https://github.com/wtseng530/AVLocalization.
* Accepted for publication in the ISPRS Annals of the Photogrammetry,
Remote Sensing and Spatial Information Sciences (online from July 2022)
Via