 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLarge Language Model-based Decision-making for COLREGs and the Control of Autonomous Surface Vehicles
Nov 25, 2024



In the field of autonomous surface vehicles (ASVs), devising decision-making and obstacle avoidance solutions that address maritime COLREGs (Collision Regulations), primarily defined for human operators, has long been a pressing challenge. Recent advancements in explainable Artificial Intelligence (AI) and machine learning have shown promise in enabling human-like decision-making. Notably, significant developments have occurred in the application of Large Language Models (LLMs) to the decision-making of complex systems, such as self-driving cars. The textual and somewhat ambiguous nature of COLREGs (from an algorithmic perspective), however, poses challenges that align well with the capabilities of LLMs, suggesting that LLMs may become increasingly suitable for this application soon. This paper presents and demonstrates the first application of LLM-based decision-making and control for ASVs. The proposed method establishes a high-level decision-maker that uses online collision risk indices and key measurements to make decisions for safe manoeuvres. A tailored design and runtime structure is developed to support training and real-time action generation on a realistic ASV model. Local planning and control algorithms are integrated to execute the commands for waypoint following and collision avoidance at a lower level. To the authors' knowledge, this study represents the first attempt to apply explainable AI to the dynamic control problem of maritime systems recognising the COLREGs rules, opening new avenues for research in this challenging area. Results obtained across multiple test scenarios demonstrate the system's ability to maintain online COLREGs compliance, accurate waypoint tracking, and feasible control, while providing human-interpretable reasoning for each decision.
Reinforcement Learning-Enhanced Control Barrier Functions for Robot Manipulators
Nov 21, 2022In this paper we present the implementation of a Control Barrier Function (CBF) using a quadratic program (QP) formulation that provides obstacle avoidance for a robotic manipulator arm system. CBF is a control technique that has emerged and developed over the past decade and has been extensively explored in the literature on its mathematical foundations, proof of set invariance and potential applications for a variety of safety-critical control systems. In this work we will look at the design of CBF for the robotic manipulator obstacle avoidance, discuss the selection of the CBF parameters and present a Reinforcement Learning (RL) scheme to assist with finding parameters values that provide the most efficient trajectory to successfully avoid different sized obstacles. We then create a data-set across a range of scenarios used to train a Neural-Network (NN) model that can be used within the control scheme to allow the system to efficiently adapt to different obstacle scenarios. Computer simulations (based on Matlab/Simulink) demonstrate the effectiveness of the proposed algorithm.
A Survey of Recent Machine Learning Solutions for Ship Collision Avoidance and Mission Planning
Jul 15, 2022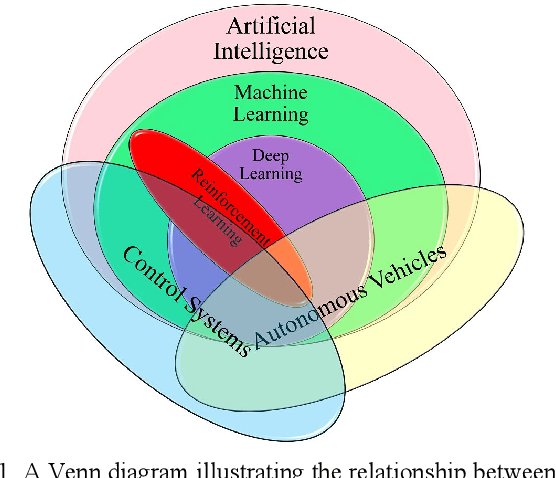
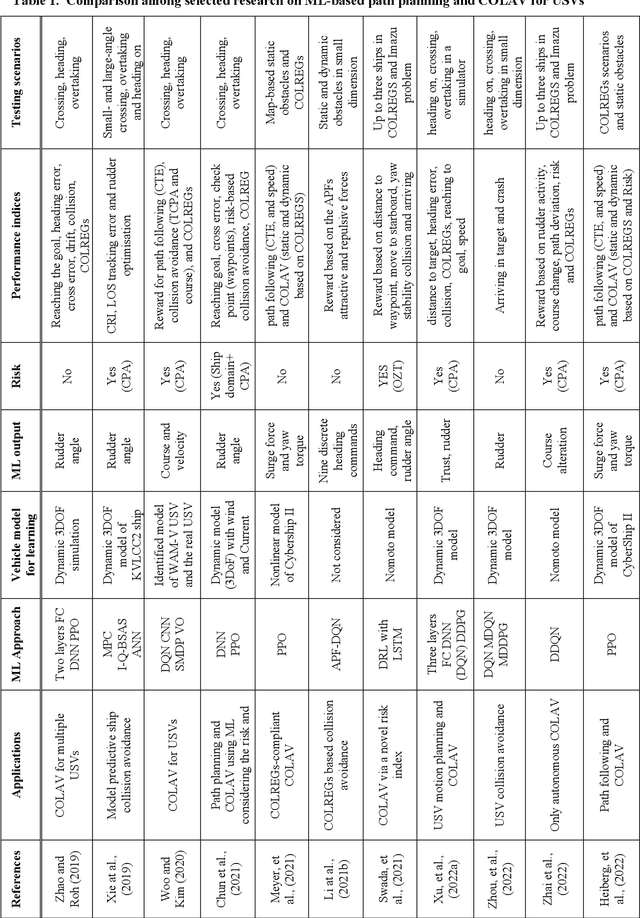
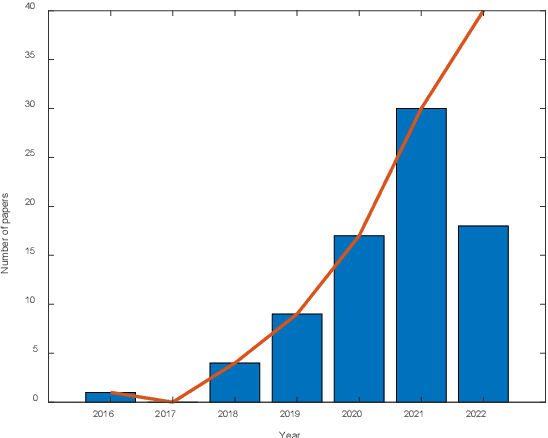
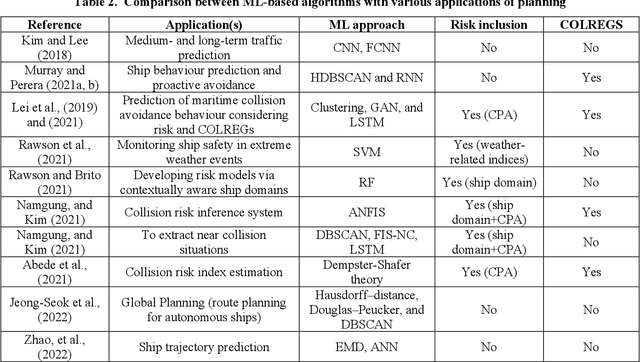
Machine Learning (ML) techniques have gained significant traction as a means of improving the autonomy of marine vehicles over the last few years. This article surveys the recent ML approaches utilised for ship collision avoidance (COLAV) and mission planning. Following an overview of the ever-expanding ML exploitation for maritime vehicles, key topics in the mission planning of ships are outlined. Notable papers with direct and indirect applications to the COLAV subject are technically reviewed and compared. Critiques, challenges, and future directions are also identified. The outcome clearly demonstrates the thriving research in this field, even though commercial marine ships incorporating machine intelligence able to perform autonomously under all operating conditions are still a long way off.