 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNon-linear stiffness behavior of planar serial robotic manipulators
Feb 17, 2022

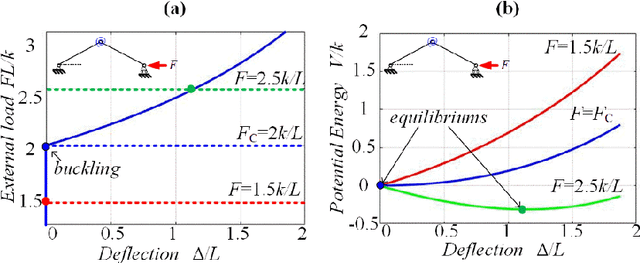
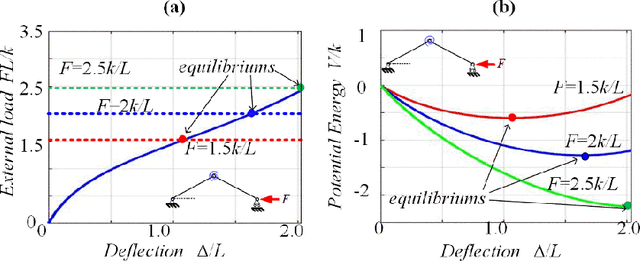
The paper focuses on the stiffness analysis of multi-link serial planar manipulators, which may demonstrate nonlinear stiffness behavior under the compressive loading. Two important cases are considered, where the manipulator has either a straight or non-straight initial configuration. It was proved that in the first case the loading may cause the buckling if it exceeds some critical value, and the manipulator suddenly changes its straight shape and stiffness properties. For computing this critical force, a general eigenvalue-based technique was proposed that can be applied to any multi-link serial manipulator. For the second case dealing with non-straight initial configurations, a universal energy-based technique was applied that allowed to detect quasi-buckling phenomenon when it is observed very fast but not instant change of the manipulator shape and its stiffness coefficient under the loading. These results are illustrated by numerous examples of non-linear stiffness behavior of three-and four-link manipulators that are subjected to compressive force.
Redundancy Resolution in Kinematic Control of Serial Manipulators in Multi-Obstacle Environment
Aug 02, 2021



The paper focuses on the redundancy resolution in kinematic control of a new type of serial manipulator composed of multiple tensegrity segments, which are moving in a multi-obstacle environment. The general problem is decomposed into two sub-problems, which deal with collision-free path planning for the robot end-effector and collision-free motion planning for the robot body. The first of them is solved via discrete dynamic programming, the second one is worked out using quadratic programming with mixed linear equality/nonequality constraints. Efficiency of the proposed technique is confirmed by simulation.
Non-linear stiffness modeling of multi-link compliant serial manipulator composed of multiple tensegrity segments
Aug 02, 2021



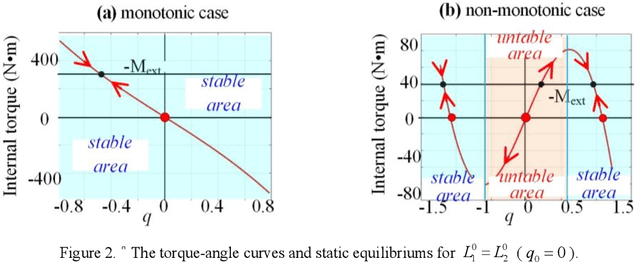
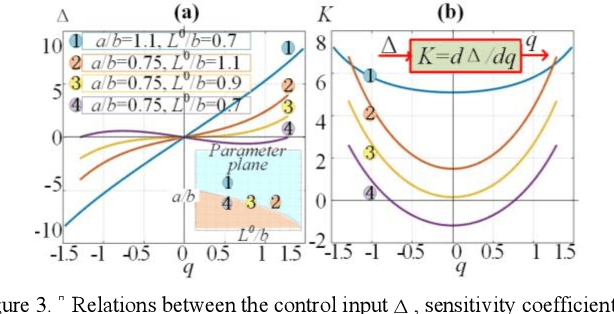
The paper focuses on the stiffness modeling of a new type of compliant manipulator and its non-linear behavior while interacting with the environment. The manipulator under study is a serial mechanical structure composed of dualtriangle segments. The main attention is paid to the initial straight configuration which may suddenly change its shape under the loading. It was discovered that under the external loading such manipulator may have six equilibrium configurations but only two of them are stable. In the neighborhood of these configurations, the manipulator behavior was analyzed using the Virtual Joint Method (VJM). This approach allowed us to propose an analytical technique for computing a critical force causing the buckling and evaluate the manipulator shape under the loading. A relevant simulation study confirmed the validity of the developed technique and its advantages in non-linear stiffness analysis.
Kinematic Control of compliant serial manipulators composed of dual-triangles
Feb 19, 2021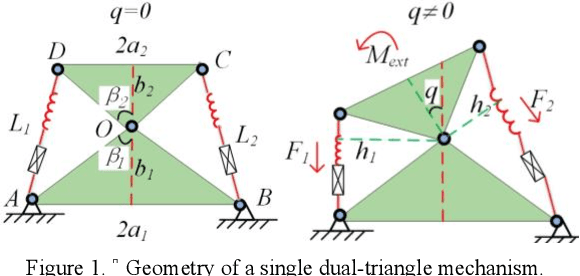

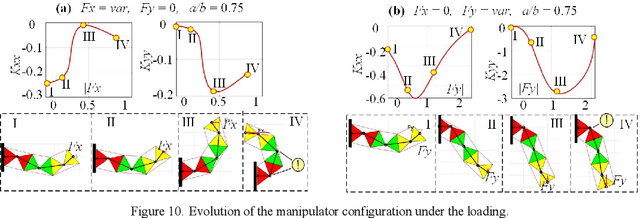
The paper focuses on the kinematics control of a compliant serial manipulator composed of a new type of dualtriangle elastic segments. Some useful optimization techniques were applied to solve the geometric redundancy problem, ensure the stability of the manipulator configurations with respect to the external forces/torques applied to the endeffector. The efficiency of the developed control algorisms is confirmed by simulation.
* arXiv admin note: text overlap with arXiv:2011.06912
Mechanics of compliant serial manipulator composed of dual-triangle segments
Nov 13, 2020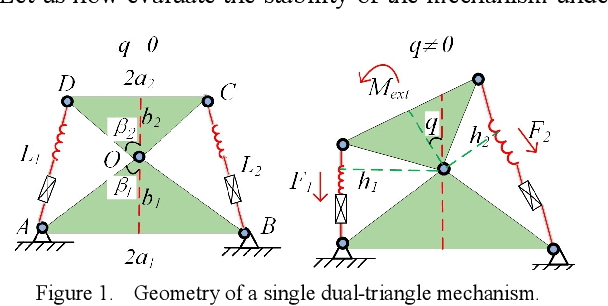
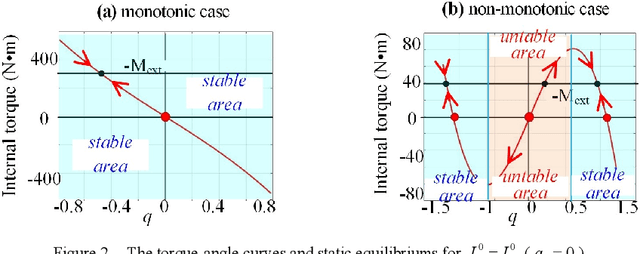
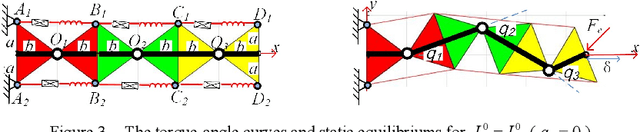
The paper focuses on the mechanics of a compliant serial manipulator composed of new type of dual-triangle elastic segments. Both the analytical and numerical methods were used to find the manipulator stable and unstable equilibrium configurations, as well as to predict corresponding manipulator shapes. The stiffness analysis was carried on for both loaded and unloaded modes, the stiffness matrices were computed using the Virtual Joint Method (VJM). The results demonstrate that either buckling or quasi-buckling phenomenon may occur under the loading, if the manipulator corresponding initial configuration is straight or non-straight one. Relevant simulation results are presented that confirm the theoretical study.