Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKinematic Control of compliant serial manipulators composed of dual-triangles
Paper and Code
Feb 19, 2021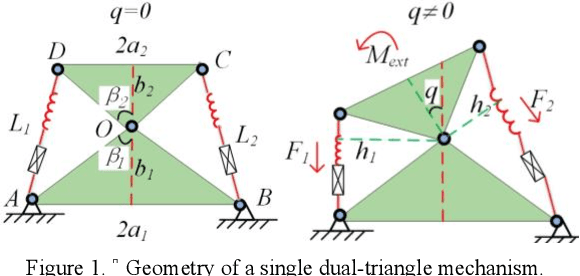
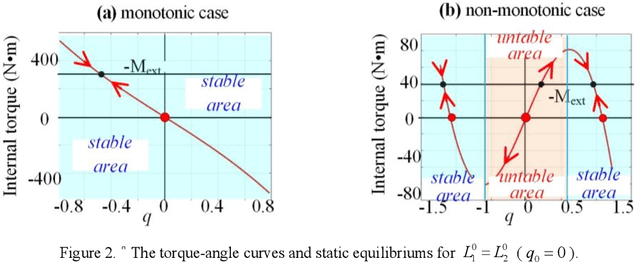
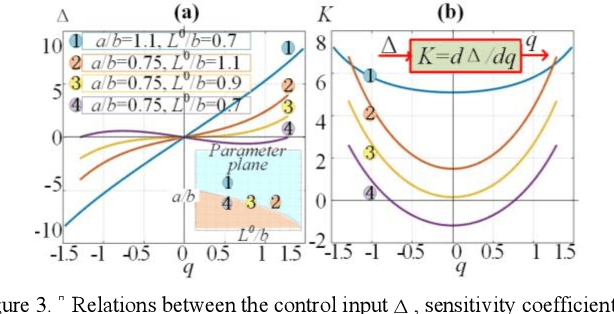

The paper focuses on the kinematics control of a compliant serial manipulator composed of a new type of dualtriangle elastic segments. Some useful optimization techniques were applied to solve the geometric redundancy problem, ensure the stability of the manipulator configurations with respect to the external forces/torques applied to the endeffector. The efficiency of the developed control algorisms is confirmed by simulation.
* 2021 International Conference on Computer, Control and Robotics
(ICCCR), Jan 2021, Shanghai, China. pp.93-97 * arXiv admin note: text overlap with arXiv:2011.06912
View paper on