 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimizing YOLO Architectures for Optimal Road Damage Detection and Classification: A Comparative Study from YOLOv7 to YOLOv10
Oct 10, 2024

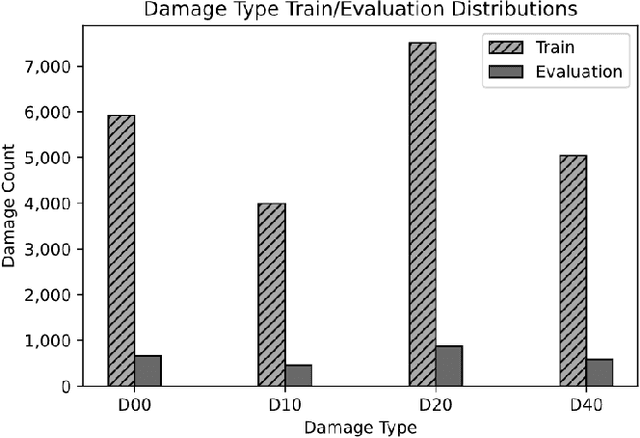
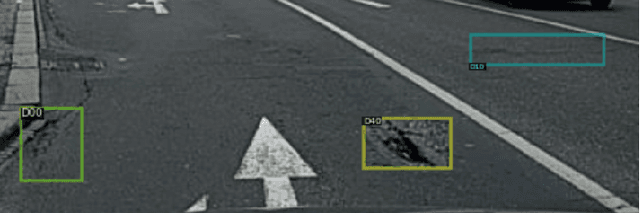
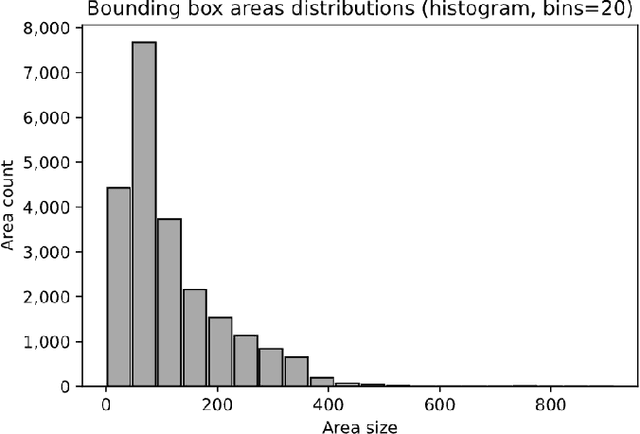
Maintaining roadway infrastructure is essential for ensuring a safe, efficient, and sustainable transportation system. However, manual data collection for detecting road damage is time-consuming, labor-intensive, and poses safety risks. Recent advancements in artificial intelligence, particularly deep learning, offer a promising solution for automating this process using road images. This paper presents a comprehensive workflow for road damage detection using deep learning models, focusing on optimizations for inference speed while preserving detection accuracy. Specifically, to accommodate hardware limitations, large images are cropped, and lightweight models are utilized. Additionally, an external pothole dataset is incorporated to enhance the detection of this underrepresented damage class. The proposed approach employs multiple model architectures, including a custom YOLOv7 model with Coordinate Attention layers and a Tiny YOLOv7 model, which are trained and combined to maximize detection performance. The models are further reparameterized to optimize inference efficiency. Experimental results demonstrate that the ensemble of the custom YOLOv7 model with three Coordinate Attention layers and the default Tiny YOLOv7 model achieves an F1 score of 0.7027 with an inference speed of 0.0547 seconds per image. The complete pipeline, including data preprocessing, model training, and inference scripts, is publicly available on the project's GitHub repository, enabling reproducibility and facilitating further research.
Road Damages Detection and Classification with YOLOv7
Oct 31, 2022Maintaining the roadway infrastructure is one of the essential factors in enabling a safe, economic, and sustainable transportation system. Manual roadway damage data collection is laborious and unsafe for humans to perform. This area is poised to benefit from the rapid advance and diffusion of artificial intelligence technologies. Specifically, deep learning advancements enable the detection of road damages automatically from the collected road images. This work proposes to collect and label road damage data using Google Street View and use YOLOv7 (You Only Look Once version 7) together with coordinate attention and related accuracy fine-tuning techniques such as label smoothing and ensemble method to train deep learning models for automatic road damage detection and classification. The proposed approaches are applied to the Crowdsensing-based Road Damage Detection Challenge (CRDDC2022), IEEE BigData 2022. The results show that the data collection from Google Street View is efficient, and the proposed deep learning approach results in F1 scores of 81.7% on the road damage data collected from the United States using Google Street View and 74.1% on all test images of this dataset.
Road Damage Detection and Classification with Detectron2 and Faster R-CNN
Oct 28, 2020
The road is vital for many aspects of life, and road maintenance is crucial for human safety. One of the critical tasks to allow timely repair of road damages is to quickly and efficiently detect and classify them. This work details the strategies and experiments evaluated for these tasks. Specifically, we evaluate Detectron2's implementation of Faster R-CNN using different base models and configurations. We also experiment with these approaches using the Global Road Damage Detection Challenge 2020, A Track in the IEEE Big Data 2020 Big Data Cup Challenge dataset. The results show that the X101-FPN base model for Faster R-CNN with Detectron2's default configurations are efficient and general enough to be transferable to different countries in this challenge. This approach results in F1 scores of 51.0% and 51.4% for the test1 and test2 sets of the challenge, respectively. Though the visualizations show good prediction results, the F1 scores are low. Therefore, we also evaluate the prediction results against the existing annotations and discover some discrepancies. Thus, we also suggest strategies to improve the labeling process for this dataset.
Outliagnostics: Visualizing Temporal Discrepancy in Outlying Signatures of Data Entries
Oct 30, 2019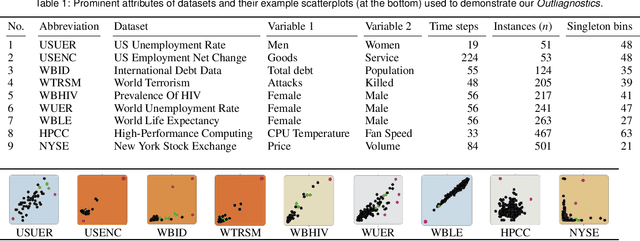
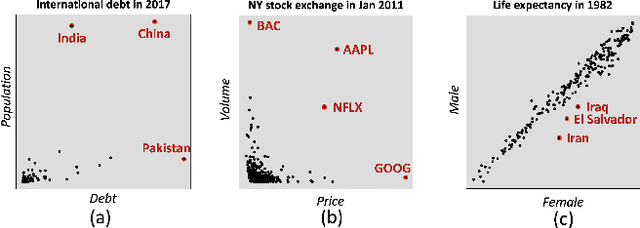
This paper presents an approach to analyzing two-dimensional temporal datasets focusing on identifying observations that are significant in calculating the outliers of a scatterplot. We also propose a prototype, called Outliagnostics, to guide users when interactively exploring abnormalities in large time series. Instead of focusing on detecting outliers at each time point, we monitor and display the discrepant temporal signatures of each data entry concerning the overall distributions. Our prototype is designed to handle these tasks in parallel to improve performance. To highlight the benefits and performance of our approach, we illustrate and validate the use of Outliagnostics on real-world datasets of various sizes in different parallelism configurations. This work also discusses how to extend these ideas to handle time series with a higher number of dimensions and provides a prototype for this type of datasets.