 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimizing YOLO Architectures for Optimal Road Damage Detection and Classification: A Comparative Study from YOLOv7 to YOLOv10
Oct 10, 2024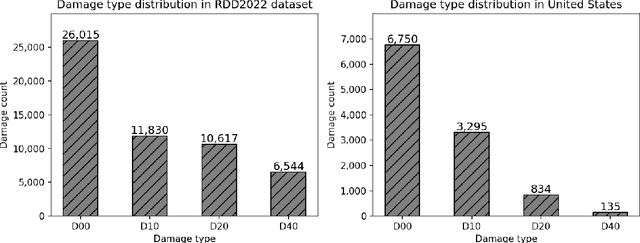
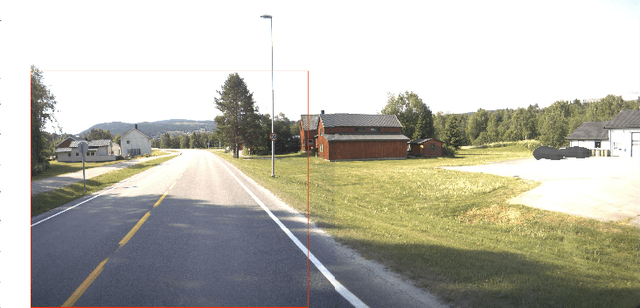

Maintaining roadway infrastructure is essential for ensuring a safe, efficient, and sustainable transportation system. However, manual data collection for detecting road damage is time-consuming, labor-intensive, and poses safety risks. Recent advancements in artificial intelligence, particularly deep learning, offer a promising solution for automating this process using road images. This paper presents a comprehensive workflow for road damage detection using deep learning models, focusing on optimizations for inference speed while preserving detection accuracy. Specifically, to accommodate hardware limitations, large images are cropped, and lightweight models are utilized. Additionally, an external pothole dataset is incorporated to enhance the detection of this underrepresented damage class. The proposed approach employs multiple model architectures, including a custom YOLOv7 model with Coordinate Attention layers and a Tiny YOLOv7 model, which are trained and combined to maximize detection performance. The models are further reparameterized to optimize inference efficiency. Experimental results demonstrate that the ensemble of the custom YOLOv7 model with three Coordinate Attention layers and the default Tiny YOLOv7 model achieves an F1 score of 0.7027 with an inference speed of 0.0547 seconds per image. The complete pipeline, including data preprocessing, model training, and inference scripts, is publicly available on the project's GitHub repository, enabling reproducibility and facilitating further research.