 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeChip Placement with Diffusion
Jul 17, 2024



Macro placement is a vital step in digital circuit design that defines the physical location of large collections of components, known as macros, on a 2-dimensional chip. The physical layout obtained during placement determines key performance metrics of the chip, such as power consumption, area, and performance. Existing learning-based methods typically fall short because of their reliance on reinforcement learning, which is slow and limits the flexibility of the agent by casting placement as a sequential process. Instead, we use a powerful diffusion model to place all components simultaneously. To enable such models to train at scale, we propose a novel architecture for the denoising model, as well as an algorithm to generate large synthetic datasets for pre-training. We empirically show that our model can tackle the placement task, and achieve competitive performance on placement benchmarks compared to state-of-the-art methods.
DreamSmooth: Improving Model-based Reinforcement Learning via Reward Smoothing
Nov 02, 2023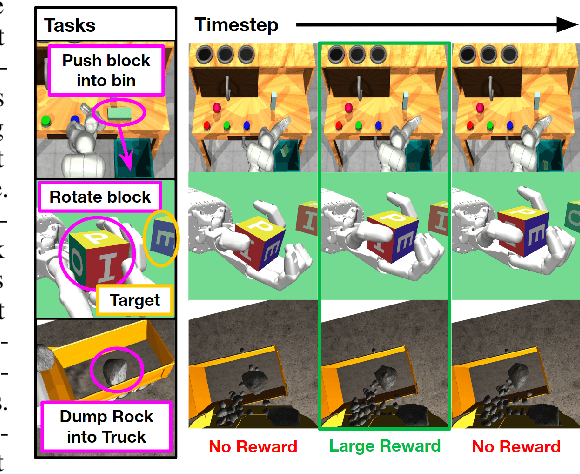

Model-based reinforcement learning (MBRL) has gained much attention for its ability to learn complex behaviors in a sample-efficient way: planning actions by generating imaginary trajectories with predicted rewards. Despite its success, we found that surprisingly, reward prediction is often a bottleneck of MBRL, especially for sparse rewards that are challenging (or even ambiguous) to predict. Motivated by the intuition that humans can learn from rough reward estimates, we propose a simple yet effective reward smoothing approach, DreamSmooth, which learns to predict a temporally-smoothed reward, instead of the exact reward at the given timestep. We empirically show that DreamSmooth achieves state-of-the-art performance on long-horizon sparse-reward tasks both in sample efficiency and final performance without losing performance on common benchmarks, such as Deepmind Control Suite and Atari benchmarks.