 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDreamSmooth: Improving Model-based Reinforcement Learning via Reward Smoothing
Paper and Code
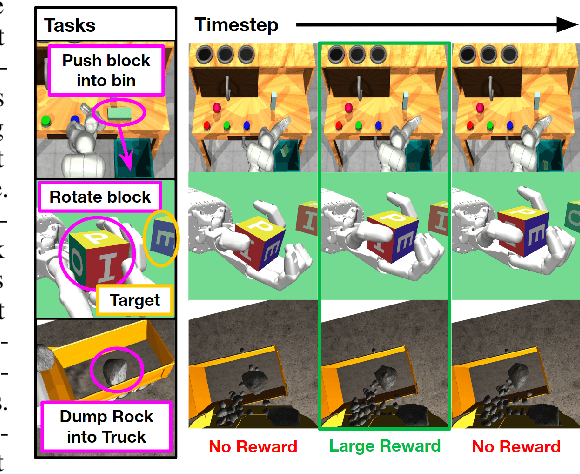

Model-based reinforcement learning (MBRL) has gained much attention for its ability to learn complex behaviors in a sample-efficient way: planning actions by generating imaginary trajectories with predicted rewards. Despite its success, we found that surprisingly, reward prediction is often a bottleneck of MBRL, especially for sparse rewards that are challenging (or even ambiguous) to predict. Motivated by the intuition that humans can learn from rough reward estimates, we propose a simple yet effective reward smoothing approach, DreamSmooth, which learns to predict a temporally-smoothed reward, instead of the exact reward at the given timestep. We empirically show that DreamSmooth achieves state-of-the-art performance on long-horizon sparse-reward tasks both in sample efficiency and final performance without losing performance on common benchmarks, such as Deepmind Control Suite and Atari benchmarks.