 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeShapeShift: Towards Text-to-Shape Arrangement Synthesis with Content-Aware Geometric Constraints
Mar 18, 2025



While diffusion-based models excel at generating photorealistic images from text, a more nuanced challenge emerges when constrained to using only a fixed set of rigid shapes, akin to solving tangram puzzles or arranging real-world objects to match semantic descriptions. We formalize this problem as shape-based image generation, a new text-guided image-to-image translation task that requires rearranging the input set of rigid shapes into non-overlapping configurations and visually communicating the target concept. Unlike pixel-manipulation approaches, our method, ShapeShift, explicitly parameterizes each shape within a differentiable vector graphics pipeline, iteratively optimizing placement and orientation through score distillation sampling from pretrained diffusion models. To preserve arrangement clarity, we introduce a content-aware collision resolution mechanism that applies minimal semantically coherent adjustments when overlaps occur, ensuring smooth convergence toward physically valid configurations. By bridging diffusion-based semantic guidance with explicit geometric constraints, our approach yields interpretable compositions where spatial relationships clearly embody the textual prompt. Extensive experiments demonstrate compelling results across diverse scenarios, with quantitative and qualitative advantages over alternative techniques.
Robot Synesthesia: A Sound and Emotion Guided AI Painter
Feb 09, 2023



If a picture paints a thousand words, sound may voice a million. While recent robotic painting and image synthesis methods have achieved progress in generating visuals from text inputs, the translation of sound into images is vastly unexplored. Generally, sound-based interfaces and sonic interactions have the potential to expand accessibility and control for the user and provide a means to convey complex emotions and the dynamic aspects of the real world. In this paper, we propose an approach for using sound and speech to guide a robotic painting process, known here as robot synesthesia. For general sound, we encode the simulated paintings and input sounds into the same latent space. For speech, we decouple speech into its transcribed text and the tone of the speech. Whereas we use the text to control the content, we estimate the emotions from the tone to guide the mood of the painting. Our approach has been fully integrated with FRIDA, a robotic painting framework, adding sound and speech to FRIDA's existing input modalities, such as text and style. In two surveys, participants were able to correctly guess the emotion or natural sound used to generate a given painting more than twice as likely as random chance. On our sound-guided image manipulation and music-guided paintings, we discuss the results qualitatively.
Improving non-deterministic uncertainty modelling in Industry 4.0 scheduling
Jan 08, 2021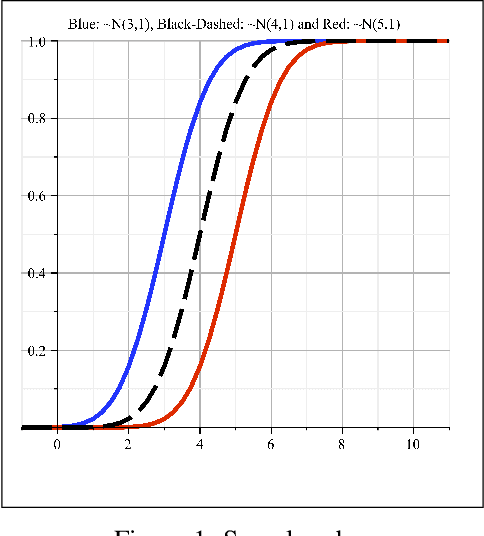
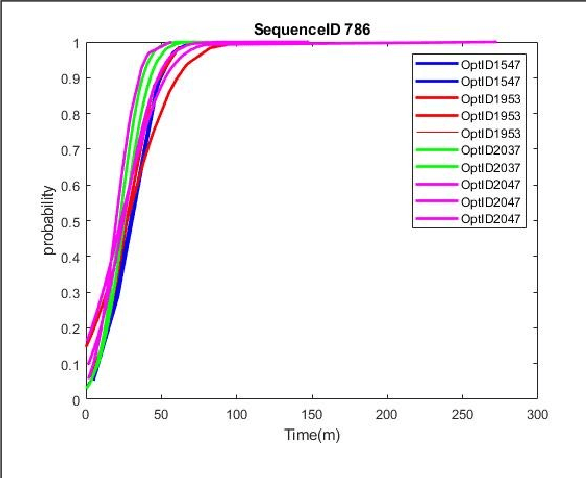
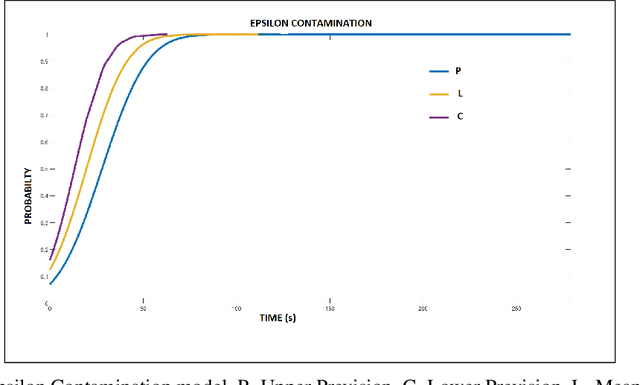
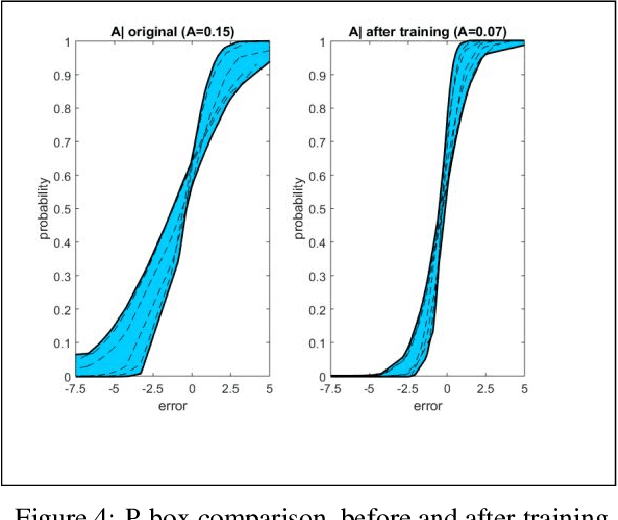
The latest Industrial revolution has helped industries in achieving very high rates of productivity and efficiency. It has introduced data aggregation and cyber-physical systems to optimize planning and scheduling. Although, uncertainty in the environment and the imprecise nature of human operators are not accurately considered for into the decision making process. This leads to delays in consignments and imprecise budget estimations. This widespread practice in the industrial models is flawed and requires rectification. Various other articles have approached to solve this problem through stochastic or fuzzy set model methods. This paper presents a comprehensive method to logically and realistically quantify the non-deterministic uncertainty through probabilistic uncertainty modelling. This method is applicable on virtually all Industrial data sets, as the model is self adjusting and uses epsilon-contamination to cater to limited or incomplete data sets. The results are numerically validated through an Industrial data set in Flanders, Belgium. The data driven results achieved through this robust scheduling method illustrate the improvement in performance.