 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSample-efficient Low-level Motion Planning for Robotic Manipulation Tasks via Zero-shot Transfer Learning
Jun 04, 2026As robotic systems become more sophisticated, the growing complexity of their motion planning models and the longer training times pose substantial challenges. Evolutionary algorithms such as the Sample-efficient Cross-Entropy Method (iCEM) have recently demonstrated promising potential for low-level real-time planning by leveraging efficient knowledge reuse strategies to improve performance. Although effective in many control tasks, iCEM's performance can be constrained in more complex scenarios, particularly those requiring stacking, sliding, and shelf placement. In this work, we propose a novel iCEM+TL framework that explicitly leverages Transfer Learning (TL), where key iCEM parameters are transferred from simpler upstream tasks to guide more complex downstream tasks. Additionally, we applied Reward Redesign (RR) through task decomposition for stacking objects and shelf placement to optimize task-specific performance. Results from the simulation show that our framework achieves success rate improvements of up to 23%. The framework is further validated on a real Franka Emika robot in a stacking task, demonstrating its practical feasibility for real-world deployment.
Probabilistic Multimodal Depth Estimation Based on Camera-LiDAR Sensor Fusion
Jul 20, 2023Multi-modal depth estimation is one of the key challenges for endowing autonomous machines with robust robotic perception capabilities. There have been outstanding advances in the development of uni-modal depth estimation techniques based on either monocular cameras, because of their rich resolution, or LiDAR sensors, due to the precise geometric data they provide. However, each of these suffers from some inherent drawbacks, such as high sensitivity to changes in illumination conditions in the case of cameras and limited resolution for the LiDARs. Sensor fusion can be used to combine the merits and compensate for the downsides of these two kinds of sensors. Nevertheless, current fusion methods work at a high level. They process the sensor data streams independently and combine the high-level estimates obtained for each sensor. In this paper, we tackle the problem at a low level, fusing the raw sensor streams, thus obtaining depth estimates which are both dense and precise, and can be used as a unified multi-modal data source for higher level estimation problems. This work proposes a Conditional Random Field model with multiple geometry and appearance potentials. It seamlessly represents the problem of estimating dense depth maps from camera and LiDAR data. The model can be optimized efficiently using the Conjugate Gradient Squared algorithm. The proposed method was evaluated and compared with the state-of-the-art using the commonly used KITTI benchmark dataset.
* 15 pages. arXiv admin note: text overlap with arXiv:1411.6387, arXiv:1702.02706 by other authors
Monocular visual autonomous landing system for quadcopter drones using software in the loop
Aug 14, 2021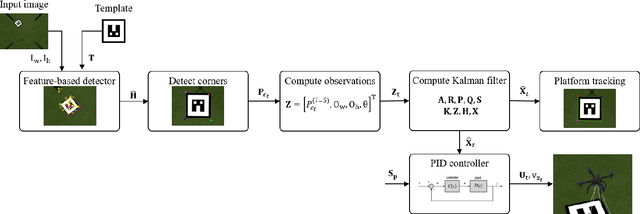
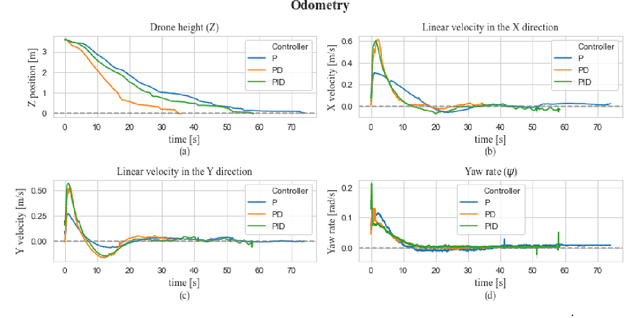

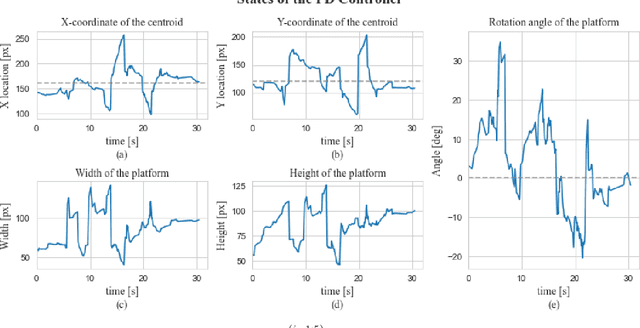
Autonomous landing is a capability that is essential to achieve the full potential of multi-rotor drones in many social and industrial applications. The implementation and testing of this capability on physical platforms is risky and resource-intensive; hence, in order to ensure both a sound design process and a safe deployment, simulations are required before implementing a physical prototype. This paper presents the development of a monocular visual system, using a software-in-the-loop methodology, that autonomously and efficiently lands a quadcopter drone on a predefined landing pad, thus reducing the risks of the physical testing stage. In addition to ensuring that the autonomous landing system as a whole fulfils the design requirements using a Gazebo-based simulation, our approach provides a tool for safe parameter tuning and design testing prior to physical implementation. Finally, the proposed monocular vision-only approach to landing pad tracking made it possible to effectively implement the system in an F450 quadcopter drone with the standard computational capabilities of an Odroid XU4 embedded processor.