 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMonocular visual autonomous landing system for quadcopter drones using software in the loop
Aug 14, 2021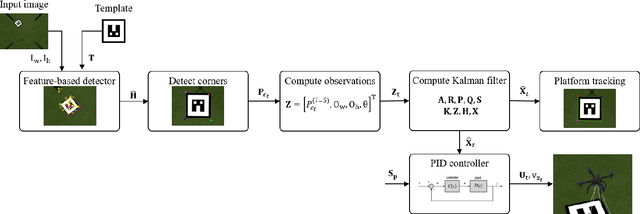

Autonomous landing is a capability that is essential to achieve the full potential of multi-rotor drones in many social and industrial applications. The implementation and testing of this capability on physical platforms is risky and resource-intensive; hence, in order to ensure both a sound design process and a safe deployment, simulations are required before implementing a physical prototype. This paper presents the development of a monocular visual system, using a software-in-the-loop methodology, that autonomously and efficiently lands a quadcopter drone on a predefined landing pad, thus reducing the risks of the physical testing stage. In addition to ensuring that the autonomous landing system as a whole fulfils the design requirements using a Gazebo-based simulation, our approach provides a tool for safe parameter tuning and design testing prior to physical implementation. Finally, the proposed monocular vision-only approach to landing pad tracking made it possible to effectively implement the system in an F450 quadcopter drone with the standard computational capabilities of an Odroid XU4 embedded processor.