 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIncremental learning of environment interactive structures from trajectories of individuals
Sep 09, 2019
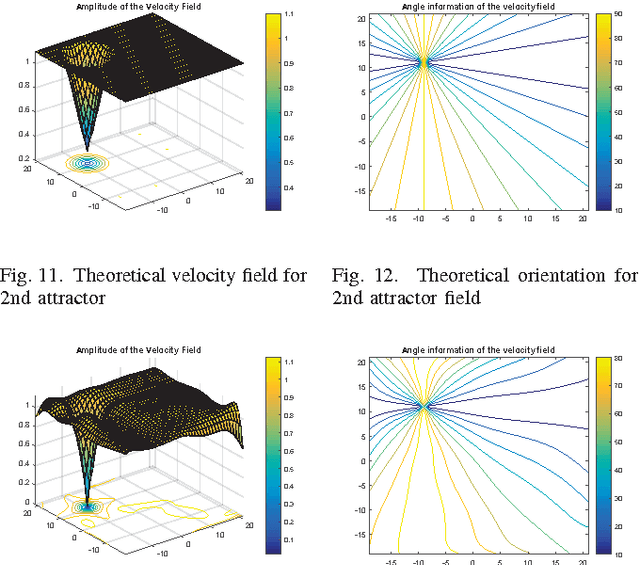
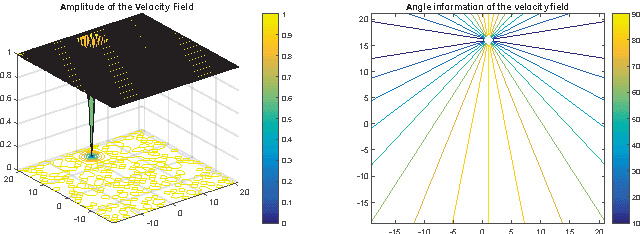
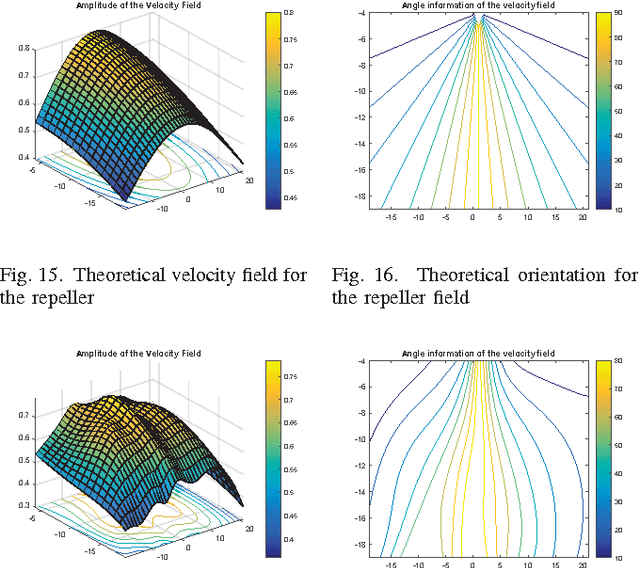
This work proposes a novel method for estimating the influence that unknown static objects might have over mobile agents. Since the motion of agents can be affected by the presence of fixed objects, it is possible use the information about trajectories deviations to infer the presence of obstacles and estimate the forces involved in a scene. Artificial neural networks are used to estimate a non-parametric function related to the velocity field influencing moving agents. The proposed method is able to incrementally learn the velocity fields due to external static objects within the monitored environment. It determines whether an object has a repulsive or an attractive influence and provides an estimation of its position and size. As stationarity is assumed, i.e., time-invariance of force fields, learned observation models can be used as prior knowledge for estimating hierarchically the properties of new objects in a scene.
Online Pedestrian Group Walking Event Detection Using Spectral Analysis of Motion Similarity Graph
Sep 03, 2019
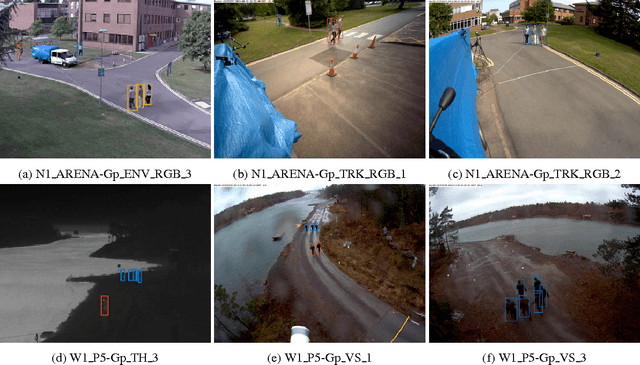
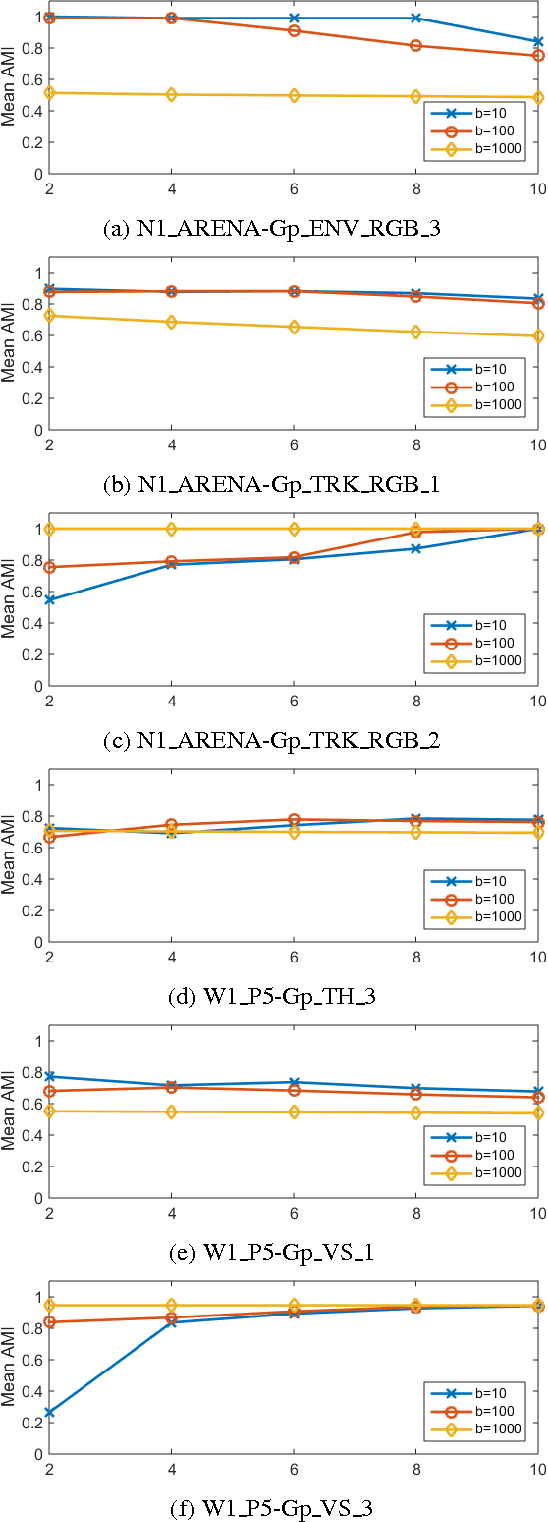
A method for online identification of group of moving objects in the video is proposed in this paper. This method at each frame identifies group of tracked objects with similar local instantaneous motion pattern using spectral clustering on motion similarity graph. Then, the output of the algorithm is used to detect the event of more than two object moving together as required by PETS2015 challenge. The performance of the algorithm is evaluated on the PETS2015 dataset.
Incremental Nonlinear System Identification and Adaptive Particle Filtering Using Gaussian Process
Aug 30, 2016
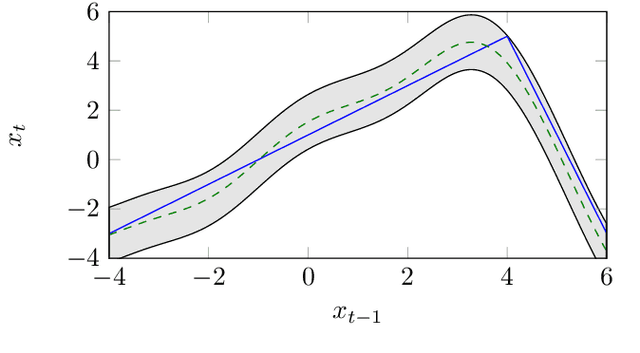
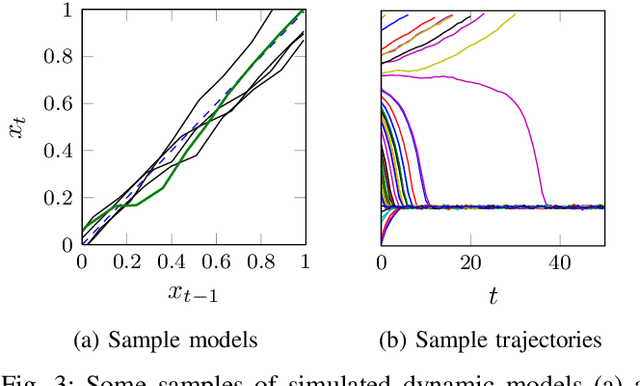
An incremental/online state dynamic learning method is proposed for identification of the nonlinear Gaussian state space models. The method embeds the stochastic variational sparse Gaussian process as the probabilistic state dynamic model inside a particle filter framework. Model updating is done at measurement sample rate using stochastic gradient descent based optimization implemented in the state estimation filtering loop. The performance of the proposed method is compared with state-of-the-art Gaussian process based batch learning methods. Finally, it is shown that the state estimation performance significantly improves due to the online learning of state dynamics.