 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIncremental learning of environment interactive structures from trajectories of individuals
Paper and Code
Sep 09, 2019
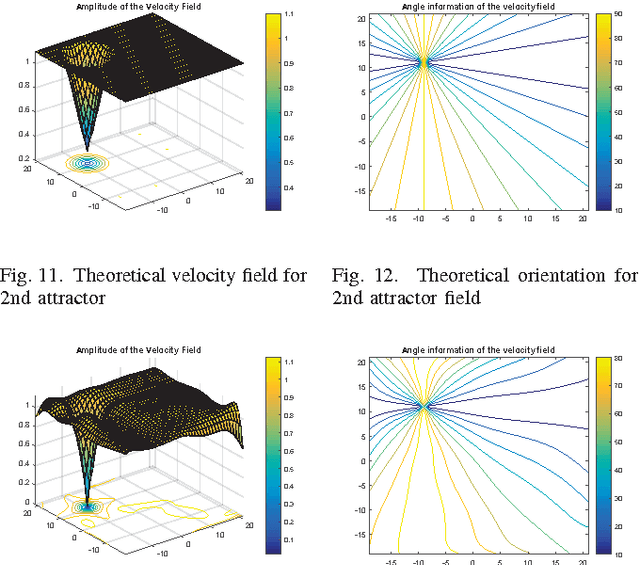
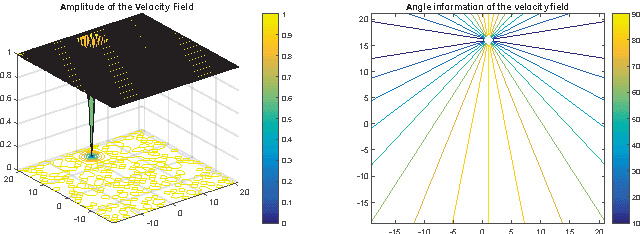
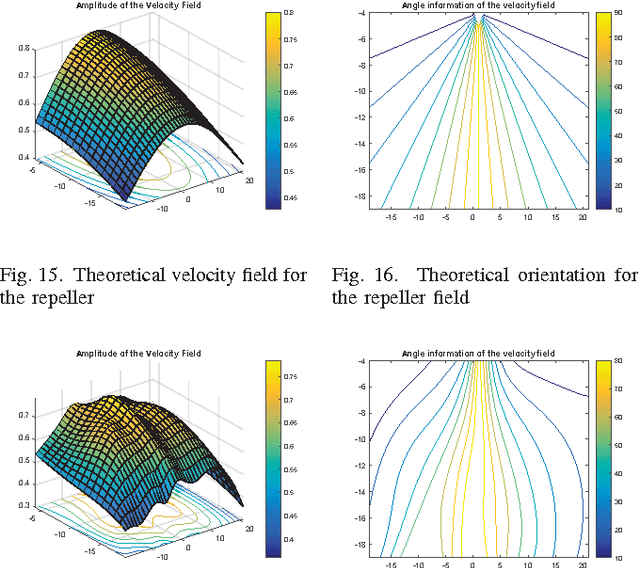
This work proposes a novel method for estimating the influence that unknown static objects might have over mobile agents. Since the motion of agents can be affected by the presence of fixed objects, it is possible use the information about trajectories deviations to infer the presence of obstacles and estimate the forces involved in a scene. Artificial neural networks are used to estimate a non-parametric function related to the velocity field influencing moving agents. The proposed method is able to incrementally learn the velocity fields due to external static objects within the monitored environment. It determines whether an object has a repulsive or an attractive influence and provides an estimation of its position and size. As stationarity is assumed, i.e., time-invariance of force fields, learned observation models can be used as prior knowledge for estimating hierarchically the properties of new objects in a scene.