Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIncremental Nonlinear System Identification and Adaptive Particle Filtering Using Gaussian Process
Paper and Code
Aug 30, 2016
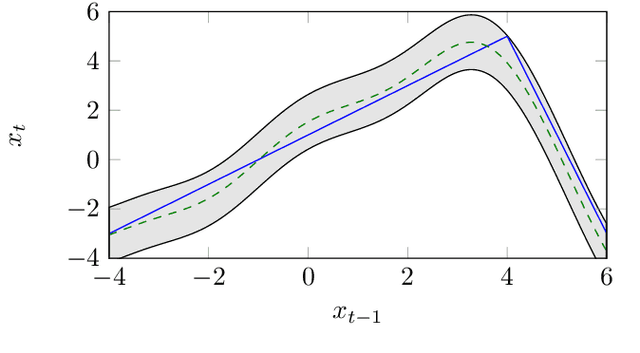
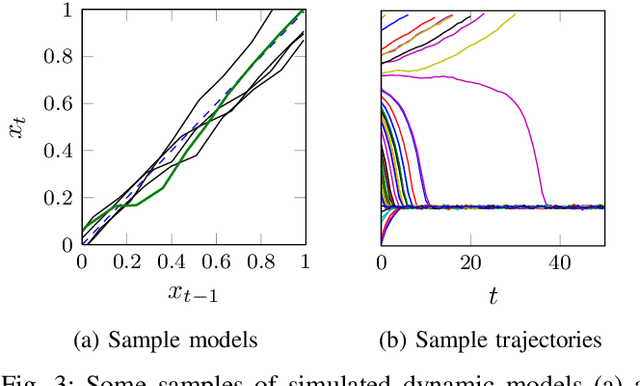
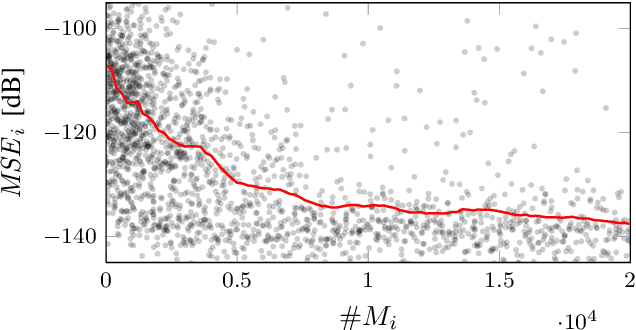
An incremental/online state dynamic learning method is proposed for identification of the nonlinear Gaussian state space models. The method embeds the stochastic variational sparse Gaussian process as the probabilistic state dynamic model inside a particle filter framework. Model updating is done at measurement sample rate using stochastic gradient descent based optimization implemented in the state estimation filtering loop. The performance of the proposed method is compared with state-of-the-art Gaussian process based batch learning methods. Finally, it is shown that the state estimation performance significantly improves due to the online learning of state dynamics.
* submitted to IEEE Signal Processing Letters
View paper on