 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRISCuer: A Reliable Multi-UAV Search and Rescue Testbed
Jun 12, 2020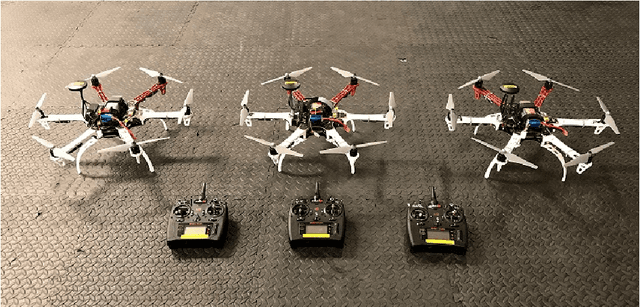
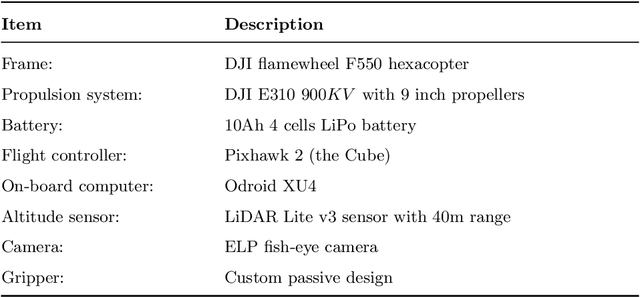

We present the RISC Lab multi-agent testbed for reliable search and rescue and aerial transport in outdoor environments. The system consists of a team of three multi-rotor Unmanned Aerial Vehicles (UAVs), which are capable of autonomously searching, picking, and transporting randomly distributed objects in an outdoor field. The method involves vision based object detection and localization, passive aerial grasping with our novel design, GPS based UAV navigation, and safe release of the objects at the drop zone. Our cooperative strategy ensures safe spatial separation between UAVs at all times and we prevent any conflicts at the drop zone using communication enabled consensus. All computation is performed onboard each UAV. We describe the complete software and hardware architecture for the system and demonstrate its reliable performance using comprehensive outdoor experiments and by comparing our results with some recent, similar works.
Fast, Composable Rescue Mission Planning for UAVs using Metric Temporal Logic
Dec 17, 2019

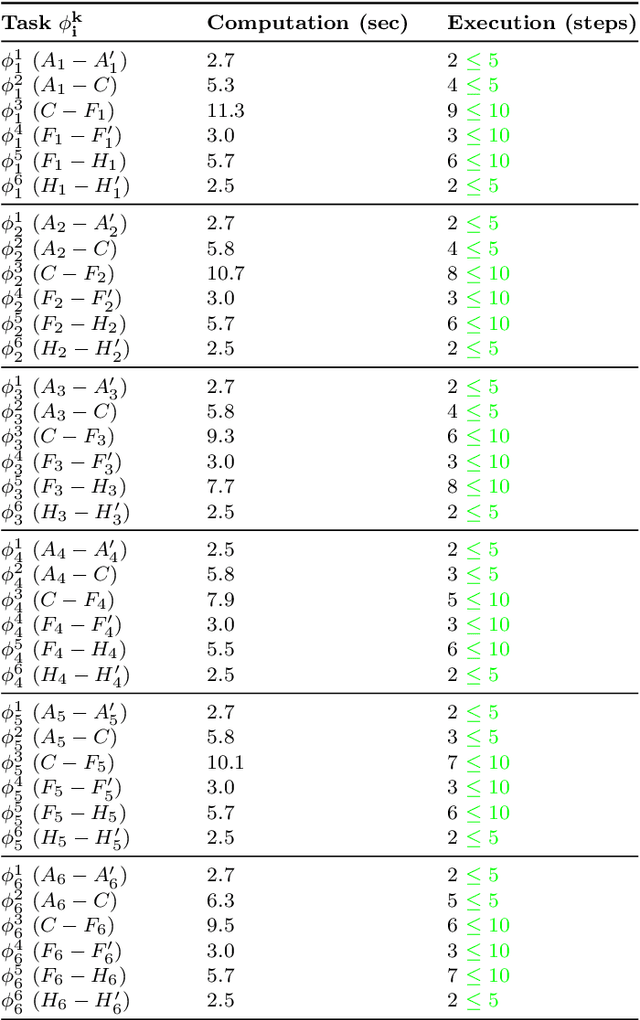
We present a hybrid compositional approach for real-time mission planning for multi-rotor unmanned aerial vehicles (UAVs) in a time critical search and rescue scenario. Starting with a known environment, we specify the mission using Metric Temporal Logic (MTL) and use a hybrid dynamical model to capture the various modes of UAV operation. We then divide the mission into several sub-tasks by exploiting the invariant nature of safety and timing constraints along the way, and the different modes (i.e., dynamics) of the UAV. For each sub-task, we translate the MTL specifications into linear constraints and solve the associated optimal control problem for desired path, using a Mixed Integer Linear Program (MILP) solver. The complete path for the mission is constructed recursively by composing the individual optimal sub-paths. We show by simulations that the resulting suboptimal trajectories satisfy the mission specifications, and the proposed approach leads to significant reduction in computational complexity of the problem, making it possible to implement in real-time. Our proposed method ensures the safety of UAVs at all times and guarantees finite time mission completion. It is also shown that our approach scales up nicely for a large number of UAVs.
Drone-Assisted Communications for Remote Areas and Disaster Relief
Sep 04, 2019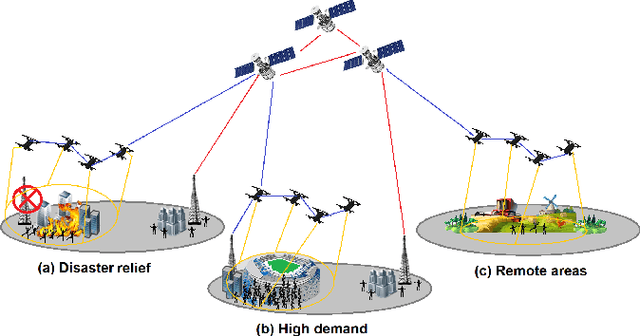

We explore an end-to-end (including access and backhaul links) UAV-assisted wireless communication system, considering both uplink and downlink traffics, with the goal of supporting demand of the Ground Users (GUs) using the minimum number of UAVs. Moreover, in order to extend the operational (flight) time of UAVs, we exploit an energy-aware routing scheme. Our intention is to design and analyze the access and backhaul connectivity of a drone-assisted communication network for remote and crowded areas and disaster relief, while minimizing the resources required i.e., the number of UAVs.
A Hybrid Compositional Approach to Optimal Mission Planning for Multi-rotor UAVs using Metric Temporal Logic
Apr 08, 2019
This paper investigates a hybrid compositional approach to optimal mission planning for multi-rotor Unmanned Aerial Vehicles (UAVs). We consider a time critical search and rescue scenario with two quadrotors in a constrained environment. Metric Temporal Logic (MTL) is used to formally describe the task specifications. In order to capture the various modes of UAV operation, we utilize a hybrid model for the system with linearized dynamics around different operating points. We divide the mission into several sub-tasks by exploiting the invariant nature of various task specifications i.e., the mutual independence of safety and timing constraints along the way, and the different modes (i,e., dynamics) of the robot. For each sub-task, we translate the MTL formulae into linear constraints, and solve the associated optimal control problem for desired path using a Mixed Integer Linear Program (MILP) solver. The complete path is constructed by the composition of individual optimal sub-paths. We show that the resulting trajectory satisfies the task specifications, and the proposed approach leads to significant reduction in computational complexity of the problem, making it possible to implement in real-time.
usBot: A Modular Robotic Testbed for Programmable Self-Assembly
Feb 27, 2019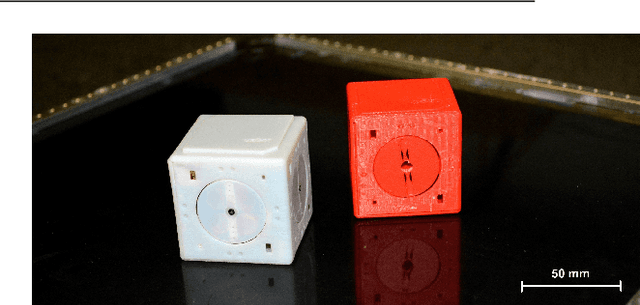
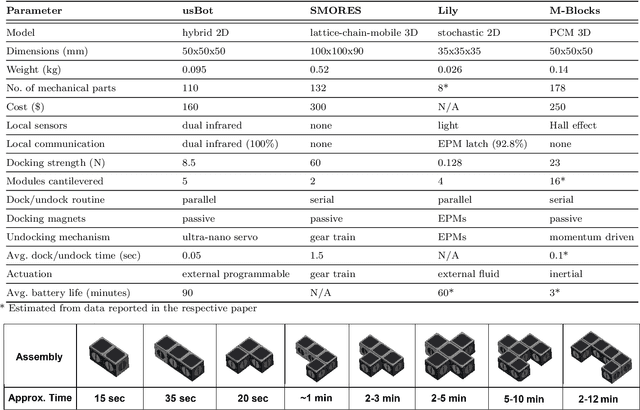
We present the design, characterization, and experimental results for a new modular robotic system for programmable self-assembly. The proposed system uses the Hybrid Cube Model (HCM), which integrates classical features from both deterministic and stochastic self-organization models. Thus, for instance, the modules are passive as far as their locomotion is concerned (stochastic), and yet they possess an active undocking routine (deterministic). The robots are constructed entirely from readily accessible components, and unlike many existing robots, their excitation is not fluid mediated. Instead, the actuation setup is a solid state, independently programmable, and highly portable platform. The system is capable of demonstrating fully autonomous and distributed stochastic self-assembly in two dimensions. It is shown to emulate the performance of several existing modular systems and promises to be a substantial effort towards developing a universal testbed for programmable self-assembly algorithms.