 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Dexterous Grasping of Novel Objects from a Single View
Aug 10, 2019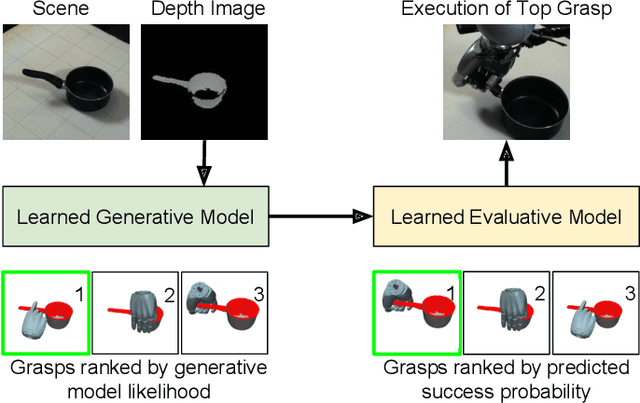
Dexterous grasping of a novel object given a single view is an open problem. This paper makes several contributions to its solution. First, we present a simulator for generating and testing dexterous grasps. Second we present a data set, generated by this simulator, of 2.4 million simulated dexterous grasps of variations of 294 base objects drawn from 20 categories. Third, we present a basic architecture for generation and evaluation of dexterous grasps that may be trained in a supervised manner. Fourth, we present three different evaluative architectures, employing ResNet-50 or VGG16 as their visual backbone. Fifth, we train, and evaluate seventeen variants of generative-evaluative architectures on this simulated data set, showing improvement from 69.53% grasp success rate to 90.49%. Finally, we present a real robot implementation and evaluate the four most promising variants, executing 196 real robot grasps in total. We show that our best architectural variant achieves a grasp success rate of 87.8% on real novel objects seen from a single view, improving on a baseline of 57.1%.
A Graph Theoretic Approach for Object Shape Representation in Compositional Hierarchies Using a Hybrid Generative-Descriptive Model
Jan 23, 2015
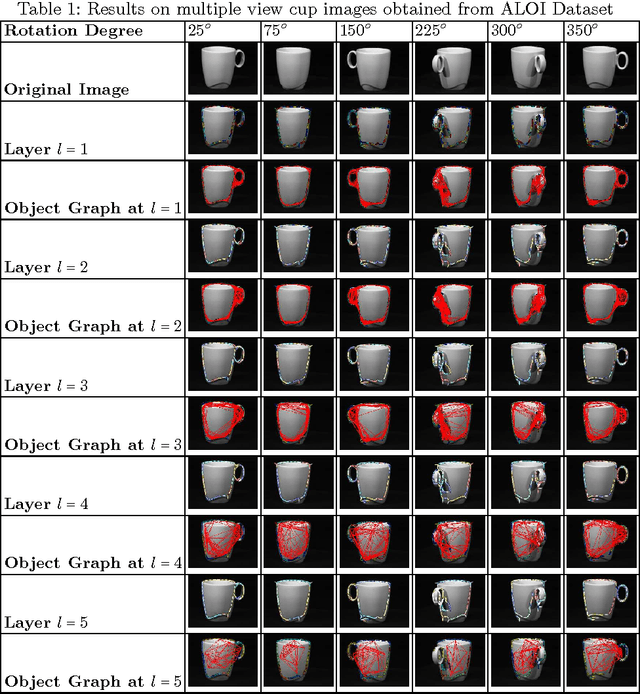
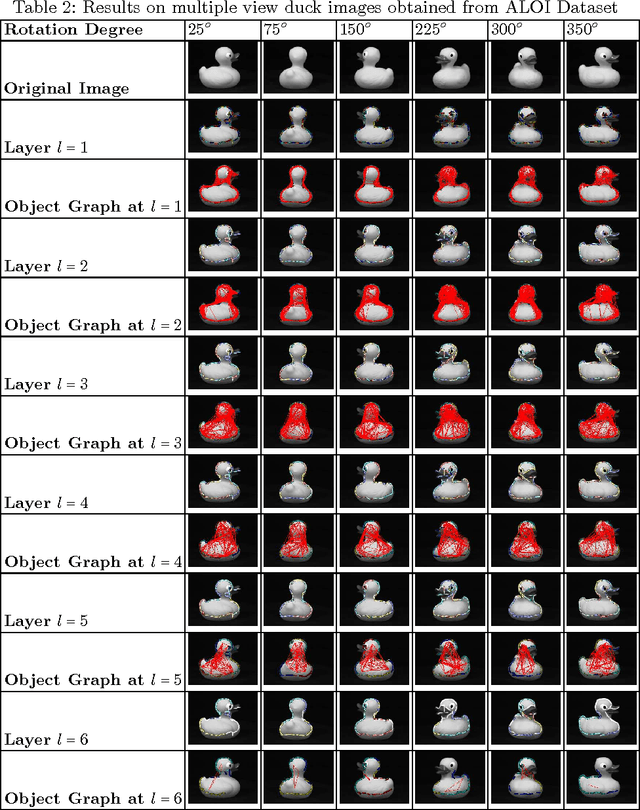

A graph theoretic approach is proposed for object shape representation in a hierarchical compositional architecture called Compositional Hierarchy of Parts (CHOP). In the proposed approach, vocabulary learning is performed using a hybrid generative-descriptive model. First, statistical relationships between parts are learned using a Minimum Conditional Entropy Clustering algorithm. Then, selection of descriptive parts is defined as a frequent subgraph discovery problem, and solved using a Minimum Description Length (MDL) principle. Finally, part compositions are constructed by compressing the internal data representation with discovered substructures. Shape representation and computational complexity properties of the proposed approach and algorithms are examined using six benchmark two-dimensional shape image datasets. Experiments show that CHOP can employ part shareability and indexing mechanisms for fast inference of part compositions using learned shape vocabularies. Additionally, CHOP provides better shape retrieval performance than the state-of-the-art shape retrieval methods.