 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Hybrid Objective Function for Robustness of Artificial Neural Networks -- Estimation of Parameters in a Mechanical System
Apr 16, 2020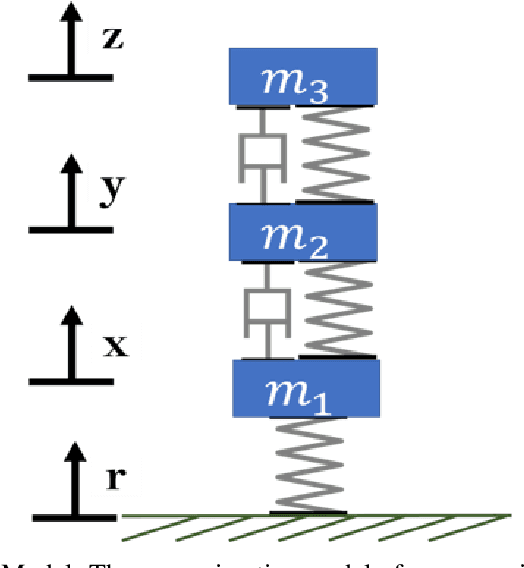
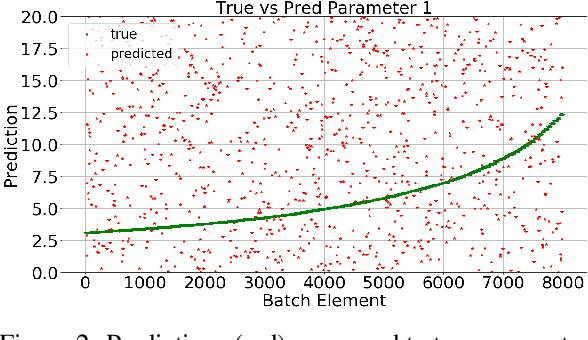
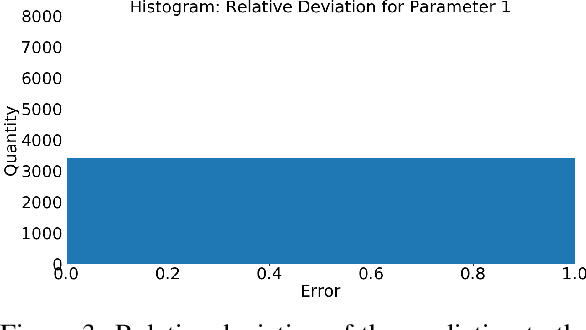
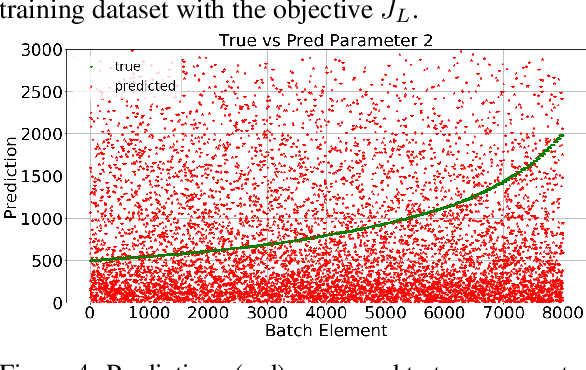
In several studies, hybrid neural networks have proven to be more robust against noisy input data compared to plain data driven neural networks. We consider the task of estimating parameters of a mechanical vehicle model based on acceleration profiles. We introduce a convolutional neural network architecture that is capable to predict the parameters for a family of vehicle models that differ in the unknown parameters. We introduce a convolutional neural network architecture that given sequential data predicts the parameters of the underlying data's dynamics. This network is trained with two objective functions. The first one constitutes a more naive approach that assumes that the true parameters are known. The second objective incorporates the knowledge of the underlying dynamics and is therefore considered as hybrid approach. We show that in terms of robustness, the latter outperforms the first objective on noisy input data.
On decision regions of narrow deep neural networks
Jul 03, 2018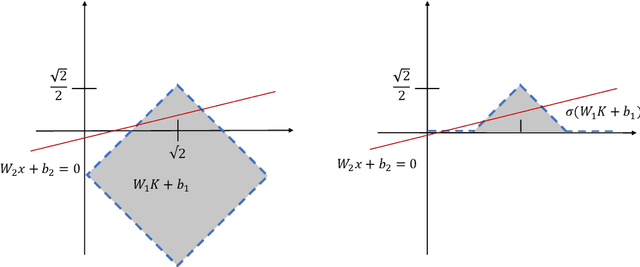

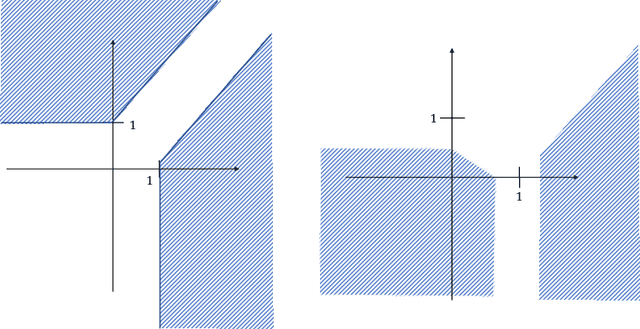

We show that for neural network functions that have width less or equal to the input dimension all connected components of decision regions are unbounded. The result holds for continuous and strictly monotonic activation functions as well as for ReLU activation. This complements recent results on approximation capabilities of [Hanin 2017 Approximating] and connectivity of decision regions of [Nguyen 2018 Neural] for such narrow neural networks. Further, we give an example that negatively answers the question posed in [Nguyen 2018 Neural] whether one of their main results still holds for ReLU activation. Our results are illustrated by means of numerical experiments.