 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvaluating Assistive Technologies on a Trade Fair: Methodological Overview and Lessons Learned
Aug 20, 2024

User-centered evaluations are a core requirement in the development of new user related technologies. However, it is often difficult to recruit sufficient participants, especially if the target population is small, particularly busy, or in some way restricted in their mobility. We bypassed these problems by conducting studies on trade fairs that were specifically designed for our target population (potentially care-receiving individuals in wheelchairs) and therefore provided our users with external incentive to attend our study. This paper presents our gathered experiences, including methodological specifications and lessons learned, and is aimed to guide other researchers with conducting similar studies. In addition, we also discuss chances generated by this unconventional study environment as well as its limitations.
Adaptive Control in Assistive Application -- A Study Evaluating Shared Control by Users with Limited Upper Limb Mobility
Jun 10, 2024



Shared control in assistive robotics blends human autonomy with computer assistance, thus simplifying complex tasks for individuals with physical impairments. This study assesses an adaptive Degrees of Freedom control method specifically tailored for individuals with upper limb impairments. It employs a between-subjects analysis with 24 participants, conducting 81 trials across three distinct input devices in a realistic everyday-task setting. Given the diverse capabilities of the vulnerable target demographic and the known challenges in statistical comparisons due to individual differences, the study focuses primarily on subjective qualitative data. The results reveal consistently high success rates in trial completions, irrespective of the input device used. Participants appreciated their involvement in the research process, displayed a positive outlook, and quick adaptability to the control system. Notably, each participant effectively managed the given task within a short time frame.
AdaptiX -- A Transitional XR Framework for Development and Evaluation of Shared Control Applications in Assistive Robotics
Oct 24, 2023


With the ongoing efforts to empower people with mobility impairments and the increase in technological acceptance by the general public, assistive technologies, such as collaborative robotic arms, are gaining popularity. Yet, their widespread success is limited by usability issues, specifically the disparity between user input and software control along the autonomy continuum. To address this, shared control concepts provide opportunities to combine the targeted increase of user autonomy with a certain level of computer assistance. This paper presents the free and open-source AdaptiX XR framework for developing and evaluating shared control applications in a high-resolution simulation environment. The initial framework consists of a simulated robotic arm with an example scenario in Virtual Reality (VR), multiple standard control interfaces, and a specialized recording/replay system. AdaptiX can easily be extended for specific research needs, allowing Human-Robot Interaction (HRI) researchers to rapidly design and test novel interaction methods, intervention strategies, and multi-modal feedback techniques, without requiring an actual physical robotic arm during the early phases of ideation, prototyping, and evaluation. Also, a Robot Operating System (ROS) integration enables the controlling of a real robotic arm in a PhysicalTwin approach without any simulation-reality gap. Here, we review the capabilities and limitations of AdaptiX in detail and present three bodies of research based on the framework. AdaptiX can be accessed at https://adaptix.robot-research.de.
In Time and Space: Towards Usable Adaptive Control for Assistive Robotic Arms
Jul 06, 2023



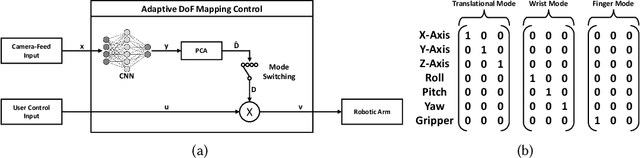
Robotic solutions, in particular robotic arms, are becoming more frequently deployed for close collaboration with humans, for example in manufacturing or domestic care environments. These robotic arms require the user to control several Degrees-of-Freedom (DoFs) to perform tasks, primarily involving grasping and manipulating objects. Standard input devices predominantly have two DoFs, requiring time-consuming and cognitively demanding mode switches to select individual DoFs. Contemporary Adaptive DoF Mapping Controls (ADMCs) have shown to decrease the necessary number of mode switches but were up to now not able to significantly reduce the perceived workload. Users still bear the mental workload of incorporating abstract mode switching into their workflow. We address this by providing feed-forward multimodal feedback using updated recommendations of ADMC, allowing users to visually compare the current and the suggested mapping in real-time. We contrast the effectiveness of two new approaches that a) continuously recommend updated DoF combinations or b) use discrete thresholds between current robot movements and new recommendations. Both are compared in a Virtual Reality (VR) in-person study against a classic control method. Significant results for lowered task completion time, fewer mode switches, and reduced perceived workload conclusively establish that in combination with feedforward, ADMC methods can indeed outperform classic mode switching. A lack of apparent quantitative differences between Continuous and Threshold reveals the importance of user-centered customization options. Including these implications in the development process will improve usability, which is essential for successfully implementing robotic technologies with high user acceptance.
Handling Object Symmetries in CNN-based Pose Estimation
Nov 26, 2020



In this paper we investigate the problems that Convolutional Neural Networks (CNN) based pose estimators have with symmetric objects. We find that the CNN's output representation has to form a closed loop when continuously rotating by one step of symmetry. Otherwise the CNN has to learn an uncontinuous function. On a 1-DOF toy example we show that commonly used representations do not fulfill this demand and analyze the problems caused thereby. In particular we find, that the popular min-over-symmetries approach for creating a symmetry aware loss tends not to work well with gradient based optimization, i.e. deep learning. We propose a representation called "closed symmetry loop"' (csl) from these insights, where the angle of relevant vectors is multiplied by the symmetry order and then generalize it to 6-DOF. The representation extends our previous algorithm including a method to disambiguate symmetric equivalents during the final pose estimation. The algorithm handles continuous rotational symmetry (i.e. a bottle) and discrete rotational symmetry (general boxes, boxes with a square face, uniform prims, but no cubes). It is evaluated on the T-LESS dataset.
Integrating Generic Sensor Fusion Algorithms with Sound State Representations through Encapsulation of Manifolds
Jul 06, 2011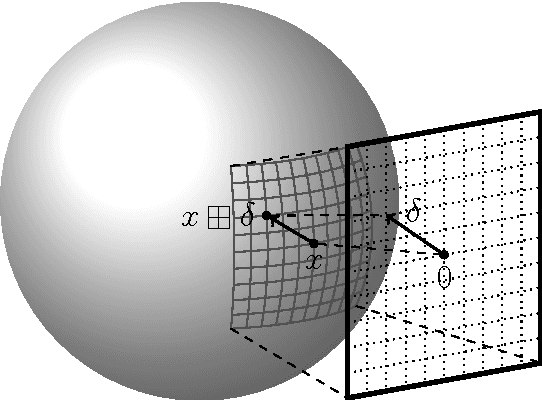
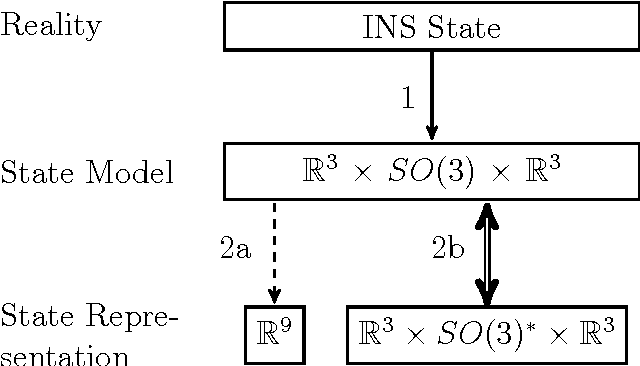
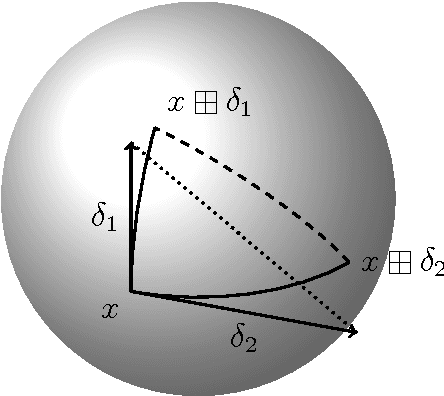
Common estimation algorithms, such as least squares estimation or the Kalman filter, operate on a state in a state space S that is represented as a real-valued vector. However, for many quantities, most notably orientations in 3D, S is not a vector space, but a so-called manifold, i.e. it behaves like a vector space locally but has a more complex global topological structure. For integrating these quantities, several ad-hoc approaches have been proposed. Here, we present a principled solution to this problem where the structure of the manifold S is encapsulated by two operators, state displacement [+]:S x R^n --> S and its inverse [-]: S x S --> R^n. These operators provide a local vector-space view \delta; --> x [+] \delta; around a given state x. Generic estimation algorithms can then work on the manifold S mainly by replacing +/- with [+]/[-] where appropriate. We analyze these operators axiomatically, and demonstrate their use in least-squares estimation and the Unscented Kalman Filter. Moreover, we exploit the idea of encapsulation from a software engineering perspective in the Manifold Toolkit, where the [+]/[-] operators mediate between a "flat-vector" view for the generic algorithm and a "named-members" view for the problem specific functions.